Paso 11: Diagrama del sistema RR.O.P.
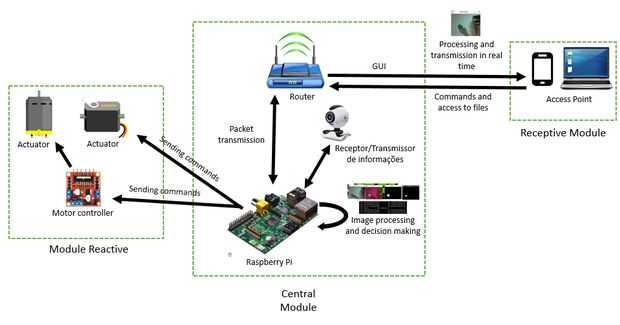
La figura de este paso muestra el contexto entero del proyecto, las partes de los sistemas se categorizaron en módulos (Central módulo módulo módulo receptiva y reactiva), donde cada partido ha dirigido a actividades que sólo por trabajar juntos, aseguró la completa funcionalidad del sistema.
• Módulo central: esta parte del sistema es el Raspberry Pi, esta característica hace que la conexión al router para crear una red entre ella y el módulo receptivo también presenta todas las configuraciones de las bibliotecas, las funciones y webcam que recibe la estructura a tratar. El sistema de visión de computadora creado este diseño fue utilizado para describir los movimientos individuales en: movimiento, movimiento y profundidad de movimiento, que dio lugar a la integración de los tres movimientos en sistema robótico utilizando recursos instalados en la Raspberry Pi. Integrar los tres movimientos, se utilizó un ajuste lógico basadas en las comparaciones, el primer objeto en ser detectada poco después de que el análisis se hace de la necesidad de ajuste de profundidad para ajustar la distancia del sistema objeto de inmediato para que más adelante se pueden hacer los otros movimientos. Profundidad de hecho el ajuste se realiza una comparación entre los límites horizontales y verticales, para determinar cuál de los dos movimientos es necesario priorizar, justificando la necesidad de diagnosticar cual de los dos límites predefinidos son menos respetados, es decir, son valores aceptables más distantes, por lo que se hace el ajuste horizontal o vertical, se analizan los límites. Poco después de que el último ajuste se realiza mediante lógica aceptable límites pueden ser ajuste horizontal o vertical, según el paso anterior de ajuste. Con estas tres opciones no podrían perder el marco de objeto antes de velocidad aceptable.
• Módulo de reactivo: esta parte del sistema, fueron clasificados los actuadores, tales actuadores cumplen la función de integración de robot y entorno externo por locomoción, reciben parámetros y activar el sistema (chasis o cámara) moverse como se mueve el objeto con el color de interés. Sus funciones se pasan por el módulo Central a través de una comunicación por la interfaz de hardware GPIO. Como el módulo Central envía comandos que los actuadores trabajan juntos para asegurar el movimiento antes de que el objeto está presente en el área de captura de la estructura.
• Módulo receptivo: esta parte del sistema se utilizó para demostrar el usuario del sistema, a través de procesamiento de vídeo o la ejecución del script con el algoritmo de todo contexto desarrollado para este trabajo, utilizando los protocolos de comunicación empleados. Para que el usuario seguir la toma de decisiones y la ejecución de las funciones, fue empleados recursos de la visión artificial OpenCV que están libremente disponibles en la documentación, qué estado la biblioteca robot, fue demostrado a través de colores y características que varían según los movimientos horizontales, verticales, o ajuste de la profundidad.













