Paso 8: Horizontal y en profundidad de movimiento usando el pt1 CVS.
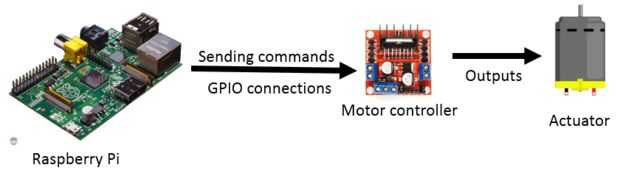


Haber realizado la segmentación y extracción de información desde el objeto en la imagen, se utilizaron algunas técnicas para asegurar la ejecución de funciones que permiten el chasis dinámico frente a los objetos segmentados. Hay tres clases de movimientos, para interactuar con el entorno externo, utilizando el software y el hardware de una manera más completa. Los cambios se refieren a la ubicación del objeto y se refieren a la utilización de su profundidad o situación:
- Hacia adelante
- Trae
- Derecho
- Izquierda
- Movimiento ascendente de la cámara
- Movimiento de la cámara baja
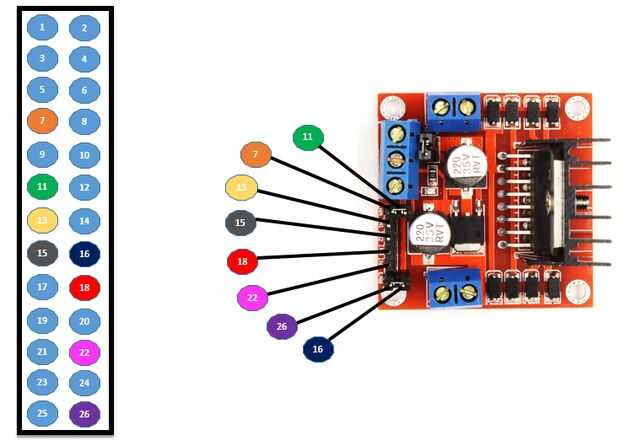
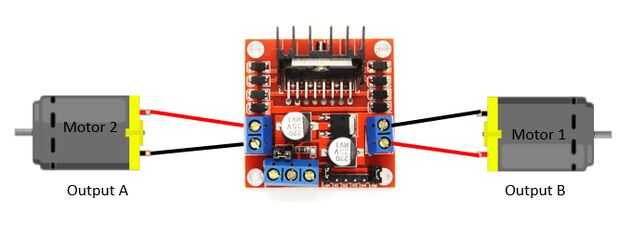
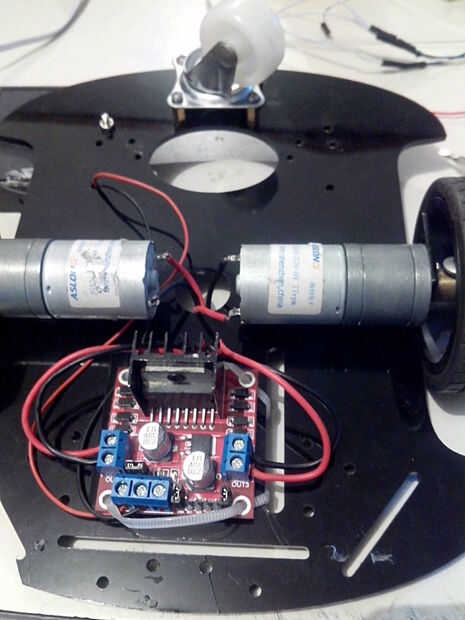
Pero con DC motores y el chasis del robot es movimiento hacia adelante, atrás, izquierda y derecha. El movimiento de ajuste horizontal y profundidad del sistema de coordenadas se realiza suponiendo que la codificación binaria digitales pulsos por sólo dos valores de pin (0 y 1) realizadas por el módulo de control, el puente de H a través de la clavija de entrada (entrada). Estos pines están conectados por puentes y conectados mediante GPIO en RPI, la secuencia de comandos es necesario importar la biblioteca GPIO y la utilización del modo GPIO:
sudo apt-get install python-rpi.gpio
Las imágenes de este paso describe todas las conexiones para el funcionamiento total del chasis robótico cerca del puente de H y motor y alimentación se realizó mediante 4 pilas tipo AA 1, 5V cada uno dando por resultado 6 V y 6000mAh. El código fuente fue necesario importar esta biblioteca y también elegir el modo de GPIO.













