Paso 1: Matriz de Sensor de presión (un resumen)

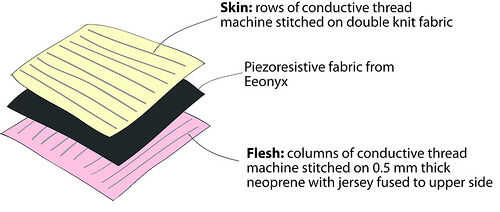
rSkin se hace de materiales elásticos por lo que puede caber firmemente sobre el brazo del robot. La conductoras filas y columnas son cosidas con un hilo conductor a las piezas adyacentes de materiales elásticos no conductores (sustratos base). Tela elástica piezorresistivo se intercala entre las conductoras filas y columnas y actúa como una capa sensible de la presión. Piezorresistivo materiales tienen la propiedad de que su resistencia eléctrica disminuye bajo bajo tensión mecánica, como la presión.
La foto en este paso muestra el conductoras filas y columnas hechas de tiras de tela conductora cosido a sus sustratos base con un hilo (no conductor) regular. Esta foto fue tomada durante la fase de prototipado y mientras que muestran muy bien las capas de la piel (la capa blanca se gira para hacer frente a la capa de color de rosa), en la versión final que cosió las conductoras filas y columnas utilizando hilo conductor, en lugar de usar tiras de tela conductora. Nuestra elección para utilizar el hilo en vez de la tela, vinieron porque reduciendo al mínimo la superficie conductora (una hebra de hilo es más delgada que una tira de tela), aumentamos la gama de sensibilidad a la presión a través de la tela piezorresistivo.
Una vez que se construye la parte del tejido de la matriz, las filas y columnas se conectan individualmente a en / salidas de un microcontrolador que actúa como un convertidor analógico a digital. Porque hay más filas y columnas que la mayoría de microcontroladores tienen pines para, utilizamos multiplexores para aumentar el número de conexiones de entrada/salida. Pero esencialmente lo que hacemos es alimentar las filas uno a uno, al leer valores analógicos (información de presión) de las columnas una por una. Porque sabemos que es accionado que fila y columna que estamos leyendo, sabemos dónde (información) el valor analógico entrante se encuentra. Todo esto sucede muy rápido, por lo que podemos analizar a través de la red entera en varias veces en menos de un segundo - que nos da la impresión de que todo sucede instantáneamente.
Mircrocontroller (en nuestro caso un Teensy) está programado para analizar las filas y columnas y recoger los datos de presión y posición, enviándola a través de la conexión USB a la computadora donde otra aplicación (escrito en el proceso), lee la cadena de datos y se traduce en una visualización mediante la asignación de los valores entrantes a su correspondiente posición en la piel del robot y sombreado, colorear o dibujar formas según la información de la presión.
La solución de fila y columna no es la única posibilidad que exploramos al acercarse a este proyecto. El Piezoresistive Touchpad fue uno de nuestros primeros ensayos, pero no es compatible con multi-touch.
Terminología (para mayor claridad):
* Base de sustratos: materiales no conductores.
* Carne: sustrato base inferior fabricado en neopreno con columnas conductor máquina cosida con hilo conductor.
* Piel: sustrato de base nivel superior hecha de tejido elástico de punto doble durable con filas conductor máquina cosida con hilo conductor.
* Base: el extremo del brazo robot enfrente de la mano. Aquí es donde todas las conexiones de fila y columna terminen/se acumulan y las conexiones a su circuito duro.
* Fecha fin: frente base final del brazo del robot. Esto es donde la mano de robot con sus dos dedos.
* Mano: la mano de robot que tiene dos dedos.
* Dedos: partes individuales de la mano de robot.
* Rastros: me refiero a las filas y columnas como rastros, son análogos a los cables conductores.
")

")








)")

