Paso 6: Cableado arduino
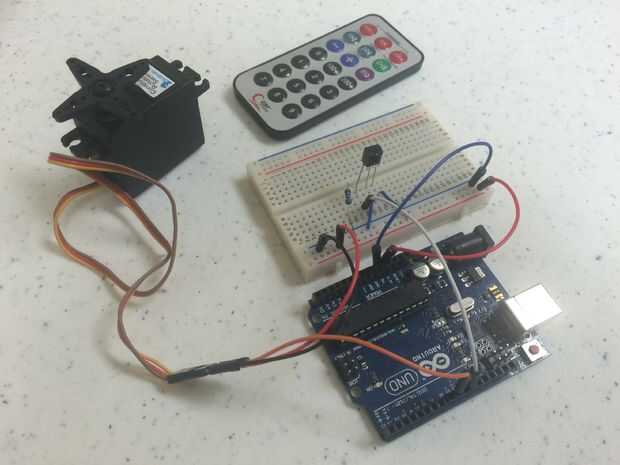
Antes de que se puede fijar la tapa de la caja negra y las patas montado en la parte superior, el arduino tiene que ser atado con alambre correctamente y dentro de la caja negra. Para empezar el cableado el arduino, primero agarrar todos los materiales necesitados: arduino sí mismo, cables, resistencia de 2 220 ohmios, 1 resistor de 10 K, el sensor de infrarrojos, el servo continuo 360, un protoboard, el cable de puerto de carga y un LED rojo y verde. La puesta en marcha es bastante básica y hay una foto por encima de lo que si parece, sin embargo este cuadro no incluye el gancho arriba de los LEDs o la longitud extra del sensor de infrarrojos.
En este punto vas a tener que encender el soldador nuevo para crear una distancia adicional para el servo, el sensor de infrarrojos y los LEDs. Primero empezar por cableado el servo. Conecte los cables positivos y negativos a las filas positivos y negativos en el protoboard y el tercer cable, que en el cuadro anaranjado, al pin 9 en el arduino. Para la configuración del sensor IR, cortar tres hilos de igual longitud, unas pocas pulgadas de largo y les de la soldadura en cada clavija del sensor IR (esto es porque el sensor de infrarrojos tiene que llegar hasta el agujero en el lado de la caja negra). Entonces cuando el sensor de infrarrojos tiene un hilo extra, poner los extremos de estos cables en la placa en una fila de tres. Mirando desde la parte delantera del sensor de infrarrojos, la pata izquierda muy debe ser en la misma columna como el resistor de 10K. 10K el otro extremo de la resistencia debe cablearse en la fila positiva de la placa. Luego se debe poner otro cable en la misma columna como el sensor y la resistencia, que está conectada al pin 11 de arduino. Este diente izquierdo del sensor de infrarrojos debe ser uno de los tres cables en la columna de la placa. Las otras dos clavijas del sensor IR necesitan estar conectados en una fila en la placa positiva y negativa. Entonces por último un cable negativo debe ejecutar en el conector de tierra en el arduino de la placa y un cable positivo de la placa a los 5V de arduino.
Entonces para conseguir los LEDs funcionan correctamente, soldar algunos cables extra en los extremos de ambos de los LEDs para que pueden alcanzar la parte superior de la caja negra. Poner el extremo positivo del LED en el centro de la placa y el extremo negativo del LED en la fila negativa de la placa. Luego poner una resistencia de 220 ohm en la misma columna como el extremo positivo del LED y correr al otro lado de la resistencia en la fila de positivo en el protoboard. Hacer lo mismo para el otro LED.
Coloque el arduino con todo el cableado es correcto en la caja negra. Luego poner el sensor de infrarrojos hasta el agujero que perforó y usar cinta aislante, cinta adhesiva en el orificio para que no se moverá y el sensor puede ser visto desde el exterior de la caja. Luego poner los LEDs verdes y rojo a través de los agujeros en la tapa de la caja que previamente fueron perforados y en epoxi para que no se mueven. Luego ejecute los cables de los servos a través del orificio en la parte posterior de la caja y en el codo de PVC. Cuando se haya secado el epoxi para los LED, conecte el cable de carga para el Banco de potencia en el arduino y pegar el otro extremo de la cuerda (que va en el Banco de potencia) del agujero que es perforado para el Banco de potencia (no conectarlo en todo a la fuente de alimentación). Entonces usted puede finalmente poner la tapa en la caja negra y tornillo en los tornillos. Todo lo que debe ver los LEDs en la tapa (no deben verse cables), el cable de carga de la parte posterior de la caja y los cables para servo sale el PVC codo también en la parte posterior de la caja.
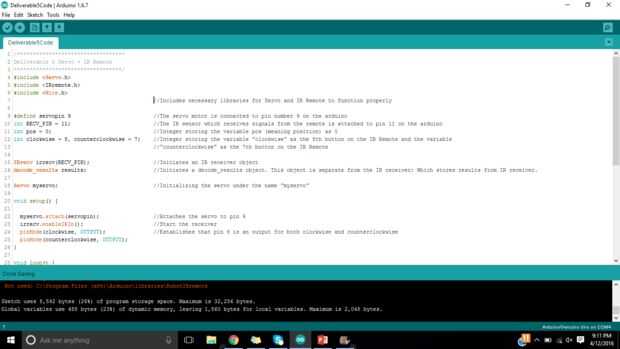
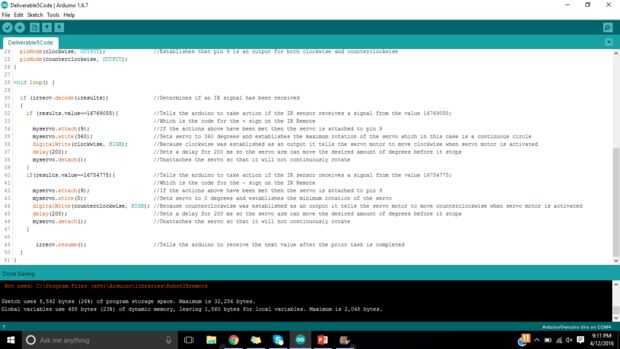
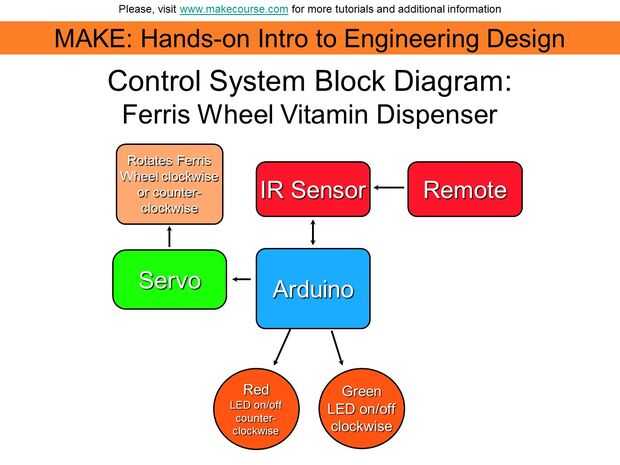
Arriba es una imagen del circuito esquemático y el código de arduino que hace la función de rueda de la fortuna que la era debe.





 origummi")



")



