Paso 1: Componentes lista de la compra


Electrónica
- Este proyecto utiliza la Junta de desarrollo de Xilinx Zybo Zynq 7000 que contiene procesadores de doble núcleo ARM Cortex-A9 y una FPGA de Xilinx de la serie 7.
- Una IMU (MPU-6050) fue utilizado para medir la velocidad angular y posición del cuerpo péndulo.
- Un motor DC sin escobillas fue utilizado para conducir la rueda libre
- Un ESC estándar fue utilizado para controlar el motor
- Utilizamos un quadcopter estándar ESC, pero no es recomendable. Fuimos incapaces de controlar la velocidad del motor a un nivel de detalle lo suficientemente fina. Esta es una de las razones por qué este proyecto no prosperó.
- un codificador óptico casero fue construido para medir la velocidad de la rueda
Marco
- Usando aluminio, una rueda fue trabajado a máquina hacia fuera con mayor peso hacia el exterior como sea posible. Esto crea un mayor momento de inercia de la rueda que hace girar que se aplica una mayor cantidad de esfuerzo de torsión en el cuerpo del péndulo.
- Si es posible, haz una rueda con un anillo de masa en el exterior y con los rayos dentro. Esto resultará en el mayor momento de inercia.
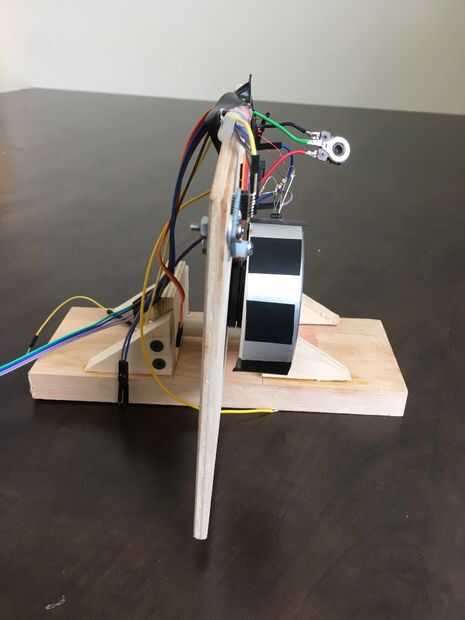
- Una montura cuadrada madera fue construida con madera contrachapada para montar el motor, rueda, IMU y el codificador óptico. Esto se refiere a como el cuerpo del péndulo en pasos posteriores. Esto se muestra en las fotos.
- Un soporte para el cuerpo del péndulo se hizo con dos pequeñas placas de rodamientos montados dentro de ellos. Una barra de aluminio entonces se montó a través de la parte inferior del cuerpo péndulo y luego a través de los cojinetes.
- Este método resultó en una gran cantidad de movimiento lateral. Trate de usar algo más parecido a este.
Encontrar la constante de par del motor
La constante de par del motor se da generalmente en la hoja de datos del motor pero si no, como en nuestro caso, puede utilizar el kilovoltio (rpm/v) valorar si el motor se encuentra el motor de esfuerzo de torsión constante.
esfuerzo de torsión del motor = 60 / (2 * pi * KV)
Codificador óptico
El codificador óptico fue construido usando un sensor de infrarrojos de línea que fue apuntado hacia el exterior de la rueda. Ocho líneas de cinta eléctrica negra fueron grabadas en intervalos incluso en el exterior de la rueda. El codificador sería detectar y un alto valor cuando estaba por encima de la cinta negra y un valor bajo de la salida cuando no era. Esto puede ser detectado por el chip Zynq y transformado en un valor de velocidad de rotación.








")



")
")