Paso 2: Entradas del Sensor
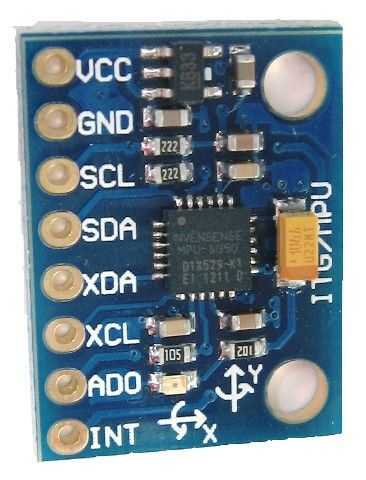
Se utilizaron dos sensores diferentes en este proyecto, una IMU 6-axis y un codificador óptico de velocidad. El IMU utilizada fue el MPU-6050 y comunicada sobre un bus I2C a la Junta de Zynq.
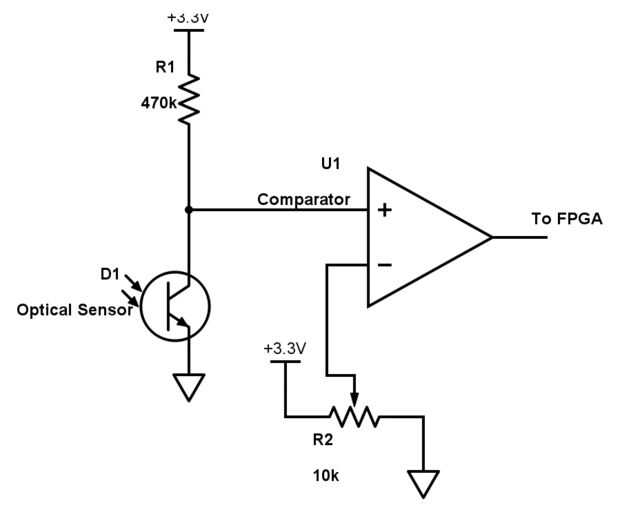
El codificador óptico fue creado mediante la colocación de cinta negra en rayas alrededor del exterior de la rueda volante. Luego una línea que sigue el sensor fue utilizada para detectar la presencia o ausencia de cinta negra. Esta señal debe ser amplificado y requiere un tablero amplificador personalizado. En esta sección se muestra el esquema para este tablero. La salida amplificada se alimentó luego hacia el FPGA de la Junta de Zynq.








")



")
")