Los principios detrás de él son simples, tienes un hemisferio unido a un motor que a su vez está conectado a un balancín. El cardán permite el motor del ángulo y por lo tanto cambiar que bit del hemisferio está en contacto con el suelo. Cuando el hemisferio y el motor de 90 grados a la superficie que están en el movimiento total será cero, sin embargo que parte de él está en contacto con el suelo se moverá si el hemisferio de la inclinación y por lo tanto cambia, más se incline más rápido se moverá.
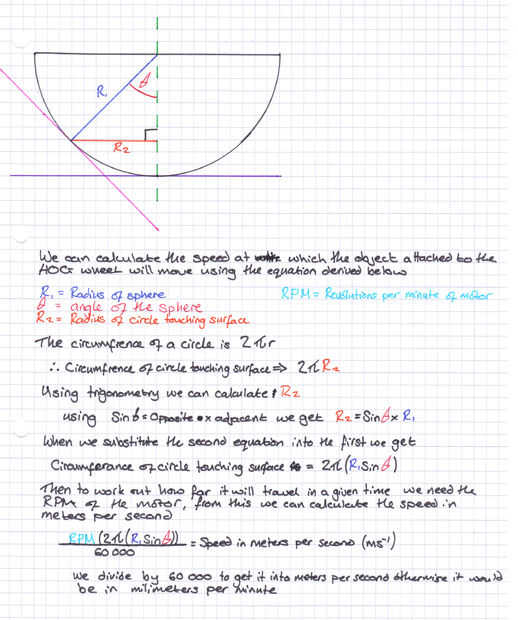
Esto es porque el motor siempre gira en aproximadamente la misma velocidad sin embargo como nos incline el hemisferio aumenta la circunferencia del círculo que está en contacto con el suelo y por lo tanto la distancia recorrida con cada rotación es mayor y aumenta la velocidad. He derivado la siguiente ecuación: velocidad = ((RPM (2π (R1sinθ) / 60000, donde RPM es revoluciones por minuto del motor; R1 es el radio de la esfera y theta (θ) es el ángulo del cardán.
La dirección que usted incline el hemisferio controla que se mueve en la dirección. Como el hemisferio siempre está girando en la misma dirección siempre hay algún momento en el hemisferio de spinning por lo que toma menos tiempo para él para acelerar. en mi diseño hay una chincheta en la parte inferior del hemisferio para que cuando esté en una superficie blanda como alfombra del hemisferio de goma seguirá vuelta libremente en lugar de quemar el motor.
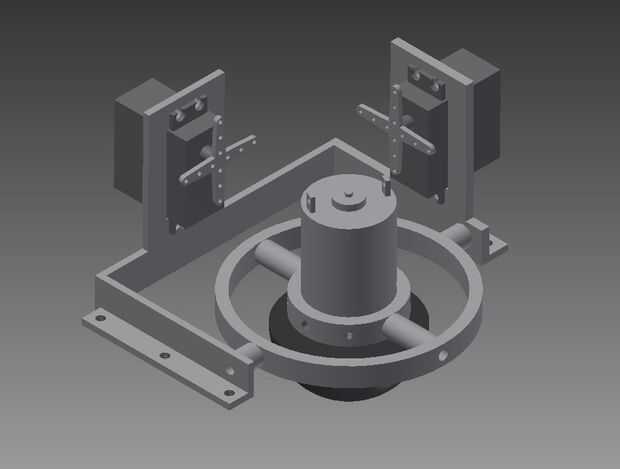
El cardán es controlado por 2 servos, uno controla el cardán interno y el otro controla el exterior. Los servos están conectados a sus respectivas cardanes por barras de metal dobladas que les permite a los cardanes de ambas maneras.
Unidos es mis diseños actuales como todavía estoy desarrollando ideas sin embargo sin una rápida, fácil y barata manera de prototipos proyectos el desarrollo de este proyecto ha molido a un alto. Estoy desarrollando esta idea con la esperanza de que el equipo de robótica en mi colegio use en uno de los robots, el único problema es el costo de lo que es. El hemisferio está a sólo un hemisferio con un radio de unos 30mm, mi Hemisferio tiene un radio de 31,85 mm ya que es una pelota de goma corte por la mitad, esta es la única parte de esto que he hecho. Hay 4 agujeros roscados en el cardán interno para grub tornillos para sostener el motor en su lugar, el cardán interno se une al cardán externo y el cardán externo conectado a la base mediante 4 M5 pernos.
Si desea utilizar mis diseños a que eres libre sin embargo le agradeceria si fuera reconoció lo mucho o lo poco que tienes de este instructable.













