
Problema: Nuestro robot utiliza la unidad de depósito regular que sólo condujo hacia adelante y hacia atrás, sabíamos que teníamos que cambiar debido a lo difícil se había convertido en maniobrar con precisión en todo el campo.
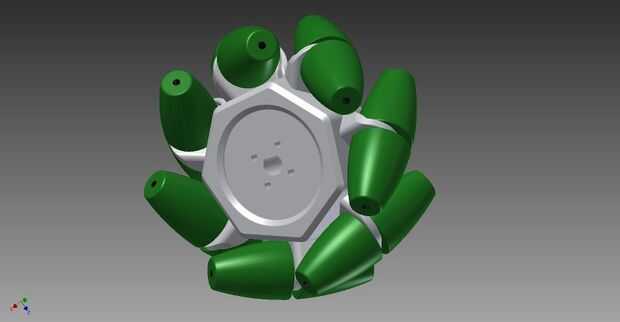
Solución: En nuestro cerebro ideas en septiembre surgió con la idea de usar ruedas de mecanum para introducir un movimiento de lado a lado junto con el movimiento hacia adelante y hacia atrás lo que ya tenían. Esto mejoraría nuestra maniobrabilidad en todo el campo.
Obstáculos:
No se puede comprar ruedas de mecanum regular para la competencia.
Estábamos refrenados de usar las ruedas de mecanum tetrix.
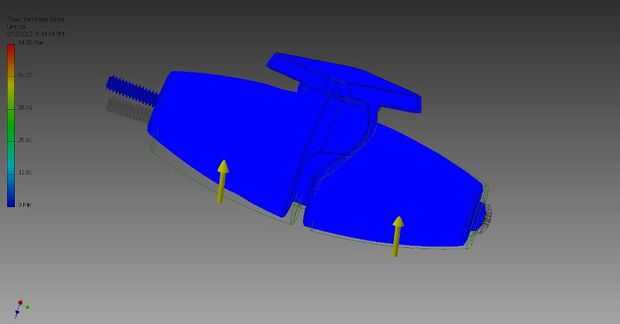
Necesitamos para CAD y diseño las ruedas nosotros mismos
Tenemos que rediseñar el chasis de nuestro robot.













