Paso 2: Secuencia muestra
Para explicar la solución, que se hace referencia a la foto de arriba en la explicación. La siguiente es una secuencia de eventos que deben ocurrir para poder recoger la bola.
- El coche de Mechbot debe ser navegar hasta el cruce y stop.
- El coche de Mechbot debe determinar si la pelota está en el lado izquierdo o lado derecho del carro.
- El coche de Mechbot entonces envía el valor de ubicación para la EVShield.
- El EVShield interpreta el código enviado desde el Mechbot.
- El EVShield recoge la bola
- Cuando se hayan completado todas las acciones para recoger la bola, se envía una señal de competición de la EVShield a la Mechbot.
- La Mechbot continúa alegremente por el camino.
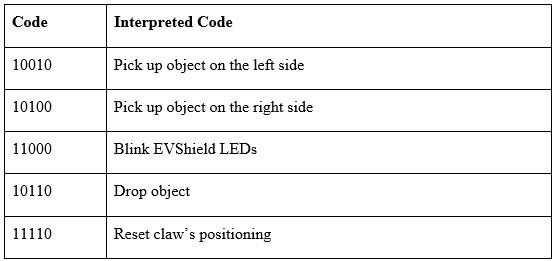
Pasos 3 y 6 requieren una comunicación y para iniciar el proceso de transmisión de datos, un apéndice del código es definido por el usuario, (Foto 2). El pedacito más significativo del código indica al receptor que una transmisión se envía (1). El próximo 3 bits son representativos del código real, y el bit menos significativo indica al receptor que el mensaje completo se ha enviado (0).
Mediante la creación de un código que es universal para dos Arduinos, instrucciones pueden comunicarse fácilmente entre los dos dispositivos. Cuando una instrucción es enviada por el Mechbot, la Mechbot permanecerá en un periodo de pausa donde espera una señal de terminación de la EVShield. Sólo cuando se recibe una señal de terminación el Mechbot continuar con sus funciones.













