Paso 2: Diseño: detección
![]()
![]()
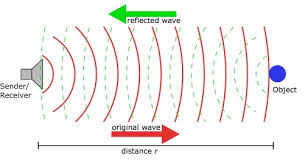
Permite comenzar con la parte de detección. En orden para el robot poder interactuar con el medio ambiente tendrá que ser capaz de sentir su entorno. Hay muchos tipos de sensores en el mundo como luz, movimiento, temperatura, sonido, distancia, presión, sensores etc.. Si el robot se mueve que probablemente desea un sensor de distancia para que cuando el robot es demasiado algo que puede llevar a cabo una decisión o puede controlar lo rápido que va dependiendo de cuánto se trata de otro objeto. Decidí usar
PING de Parallax Inc.))) Sensor de distancia ultrasónico por causa de medición de distancia medición ultrasónica no se ve afectado por la luz, el ping))) sensor sólo utiliza uno de los pines, tengo algo de experiencia usando y no he encontrado ningún problema usarlo.