Paso 4: Programación del controlador de vuelo
Ahora el controlador de vuelo necesita saber su tiene estas conexiones.
Existen métodos para mandar el controlador de vuelo de código basado Arducopter A) escuchar en estos pines analógicos y B) calibrar a valores válidos. La calibración es importante - tal vez con un módulo de alimentación de 3DR podría considerar ser perezoso y lo omitiendo, sin embargo lo más probable es la tolerancia o Spec valores del divisor y resistores shunt en nuestros cheapies son diferentes a los suministrados por el Dr. 3 y más necesidad de calibración de los valores por defecto!
Estos pasos están bastante bien documentados en la página de 3 del DR ( http://copter.ardupilot.com/wiki/common-measuring-...). No olvide seguir cualquier PIN o las instrucciones de conexión en esa página, que es para gente con módulos de potencia oficial que costumbre saltar controladores de vuelo, sólo tienes que seguir los pasos para activar y calibrar las lecturas dentro del software del planificador de misión o los pasos a continuación.
Básicamente, en el planificador de la APM:
1) Descargar sus parámetros actuales (obviamente con fc conectado vía usb o radio de 3 dr mavlink pueden comunicar).
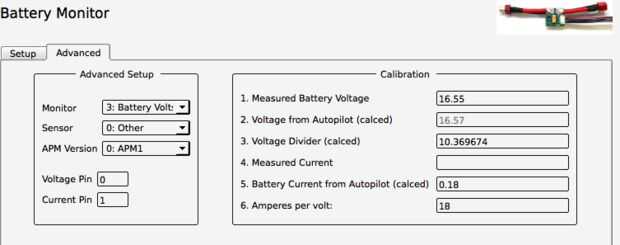
2) configuración inicial Goto / sección de control de la batería
3) en el Monitor: elegir "3 voltaje y corriente"
4) en el Sensor: elegir "otros 0"
5) en APM: elija "0 APM1"
6) Pin voltaje: 0
7) Pin actual: 1
8) luego se mide el voltaje de su batería con multímetro (no desconecte la batería, hacerlo en su lugar, puede hacerlo a través de los cables de equilibrio medición de los pernos de la final, más alejados entre sí. Es importante tener algún tipo de carga de una batería a pesar de que la carga de FCs es absolutamente mínima su todos tenemos ahora mismo, es también importante que el controlador de vuelo escuchando las señales A0 y A1 para cuando le da el valor correcto compararlo con sus valores de tensión de A0/A1 y tomar la decisión acerca de lo que el error es y cuánto para cambiar el valor de divisor).
9) a la derecha bajo calibración puede Agregar el valor medido en "voltaje de la batería medido". Esto actualizará los valores del divisor de tensión. Como sugerí cada módulo y de hecho cada resistor vale menos de $10, es un poco diferente y tiene que tener este hecho.
10) un poco más complicado es calibrar los valores de la desviación actual, es el valor de 'ameres por voltio'.
Qué su eludiendo a es que para cada v pueden ver en pin A1, va a suponer que hay algún valor constante que muchos amperios en el juego. Por ejemplo que mi valor es de 18 años, lo que significa que para cada v el módulo de potencia entrega al pin A1, el software arducopter va a creer que se están encontrando 18 amperios. Esto es donde los 90 amp máximo para el módulo de detección de corriente viene de I guess, 18 voltios por amperios * 5 voltios = 90. ¿Sería interesante ver si el sensor proporcionará un valor de voltaje perjudiciales de largo 5v a la Junta Directiva de la APM si de alguna manera se las arregló para dibujar más de 90 amperios?
Usted necesitará poner un multímetro en el modo actual de sentido entre en serie entre el positivo de la batería y la entrada positiva del módulo de potencia. Su causa difícil entonces también tienes que conectar directamente a través de la tierra de la batería al módulo de potencia. Así que ayudarán algunos clips de cocodrilo o una especial configuración con xt60s de.
Entonces tienes que medir la corriente absorbida, pero se pone más difícil otra vez hacer que tipo de quiere ser medida bajo una buena carga (es decir motores girando hasta duro). Puede hacerlo bajo la carga pequeña que el controlador de vuelo en la batería, pero su (i piensa en mi conjetura rápida sin demasiado pensamiento real) probablemente más preciso que hacerlo con un valor más grande (es decir carga más grande) a menos que tengas algunos amperímetros de bastante buena calidad.
Ive realmente no molesta con la calibración vigente todavía. Te esperaré hasta que un amigo está aquí para sostener mi tricopter mientras hago la prueba bajo carga.
Se pueden ver en la imagen la configuración y calibración de los valores que parecen ser bastante exacta para mí.
Para otros software, multiwii o hardware anterior, todos relacionados con consejos son verdaderas, sólo diferentes cosas que hacer en software para activar estas lecturas a las que se describen en el link de 3 DR mas arriba y mis comentarios - obviamente.
Eso es, usted notara la grises 'calzado' valores en esta pantalla del planificador de misión a actualizando regularmente. Deje la batería conectada durante 10 minutos y el FC/GPS/LEDs y el resto de la basura han atado con correa a su plataforma probablemente tome 1/2 voltios su espalda de la batería. Así que puede medir el voltaje otra vez a través de los cables de equilibrio y ver si el planificador de misión es contar la misma historia.





")



 - Torre de la energía")

")
