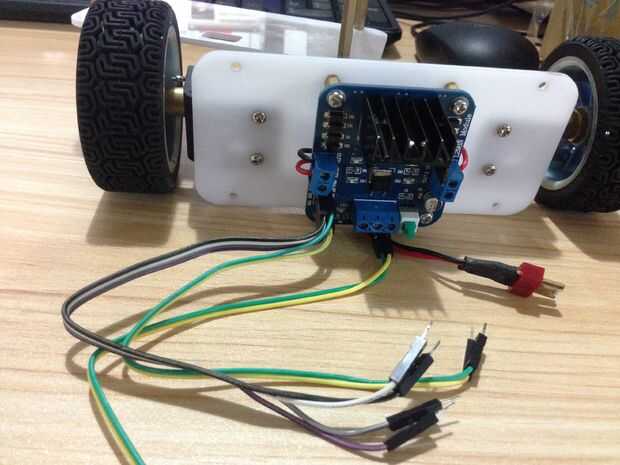
Paso 4: Cableado y conexión del Robot



La copié de la Página Web.
Batería:
Electrodo positivo -> VCC
Electrodo negativo -> GND
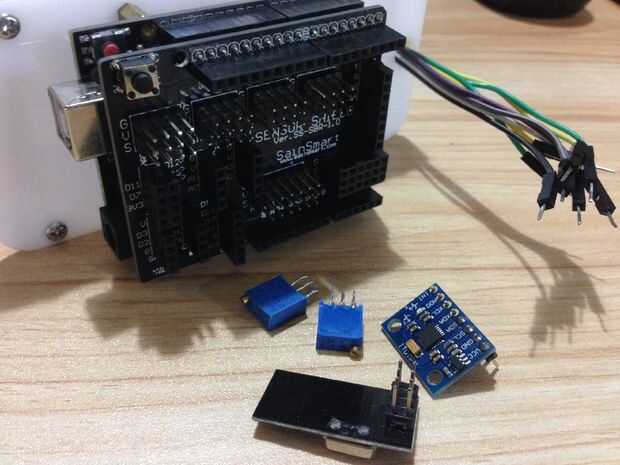
Junta Directiva:
5V -> 5V
GND -> GND
In1 -> D3
In2 -> D4
IN3 -> D5
In4 -> D6
ENA -> D9
ENB -> D10
Motor1 -> OUT1, OUT2
Motor2 -> OUT3, OUT4
Potentiometer1 -> A0
Potentiometer2 -> A2
Atención:
Como no todo el mundo soldaduras de los cables de la misma manera, si las ruedas giran en la dirección equivocada de intercambio la D3 y la D4 o el D5 y D6; Después de ajustar el robot para que puedan resistir, tratar de controlarlo con el mando. Si se pueden ir hacia adelante e ir detrás normalmente pero no puede girar, cambiar por favor D9 y D10.
Consejos:
Si los potenciómetros no pueden pegarse bien en la Junta, puede soldar los pines con un poco de soldadura de alambre.












")
