Paso 5:

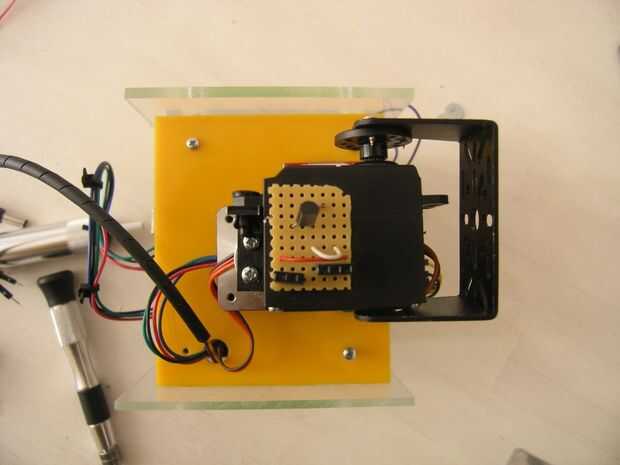

1. pegue s el motor de paso con silicona a la parte superior de la base. Instale el cabezote de aluminio en la parte superior del motor, atornille un éste el servo con ayuda de los soportes "en L", y as el Servo en posición horizontal (Esto facilita el giro)
2. instale un soporte de parte (soporte de inclinación) en el Servo, asegurándose de está en la posición 0° (Mirando hacia arriba seguramente pues el motor está aciostado - La posición se invierte en el código para todo funcione). Después de activar el cañón puede sea necesario corregir esta posición, así que no gaste mucho tiempo en esto por ahora
3. pegue s el circuito del Láser al Servo.
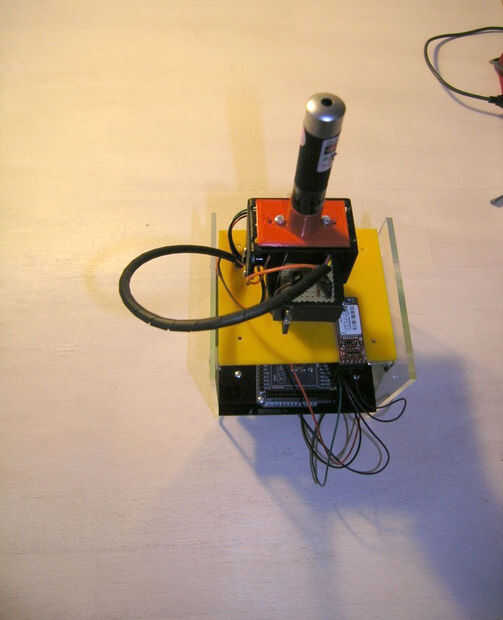
4. Ahora saludando ell soporte customizado para el láser se debe imprimir. (En tiendas de robotica se encuentran soportes para diodos láser pero siempre tuve la impresión de son mucho más angostos un ser láser, así nunca los probé) Recuerde medir el diámetro del tubo del láser y modificar el diámetro interior de la boca del soporte si aquél llega a ser distinto. Sólo hay atornillar la base del soporte al soporte de parte instalado en el Servo, pasar los cables por el gujero y continuar introduciendo el láser hasta el fondo. Si el diámetro coinciden, el láser debe sostenerse perfectamente.
5. entre los cables del láser al circuito pegado en el servo. Trate de mantener todo centrado y de los cables no estén enredados con otros.
Eso es todo en materia de construcción.








 conexión a Internet con un Router inalámbrico de banda Dual")




