Paso 6: electrónica







- el regulador del motor 2 x 25 Sabertooth http://www.dimensionengineering.com/sabertooth2x25.htm
- el arduino Uno
- y el acelerómetro.
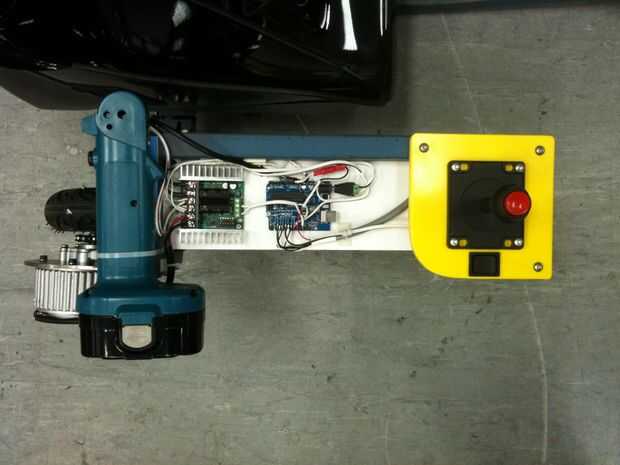
Montar el controlador del motor y el ardunio en algún lugar donde no se dañen cuando desplome! Sí usted se estrellará!
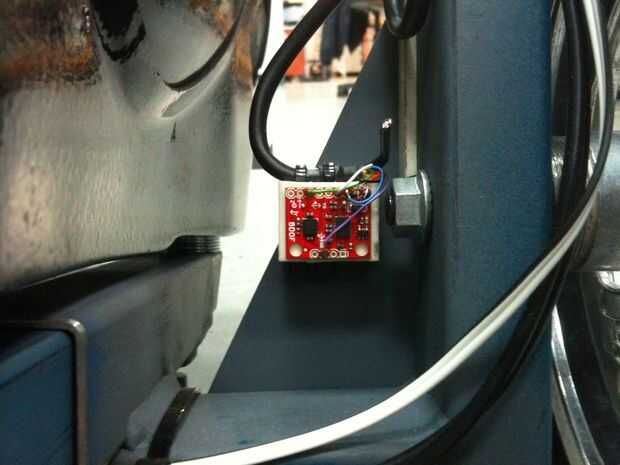
El acelerómetro debe fijarse preferentemente a la altura de eje vertical. Los cuatro orificios en la placa de circuito deben ser hacia abajo y el lado del chip en la parte posterior.
Hemos utilizado cinta de doble cara ya que es un buen aislante y pegajoso!!! Asegúrese de que está en una bonita zona impermeable y tal vez incluso del encogimiento del calor lo apretado del agua. Un termo retráctil adhesivo recubierto es bueno para esto. Utilizamos cable de escudo para el cableado ya que detendría cualquier ruido añadido en el sistema.
Asegúrese de que se lleva a cabo estrecha. Si no tienes una silla Toro bucking! Créeme que yo sé acerca de esto!
La unidad tiene unos interruptores para añadir.
- El interruptor de hombre muerto. El gran botón rojo que tiene en todo momento para trabajar la unidad.
- Eléctrico. Cortes de energía a todo. Nuestro fue construido en el portapilas.
- Joystick. Le permite girar a la izquierda y avanzar el código que viene.
- Ajuste de la inclinación. Le permite ajustar su punto de equilibrio
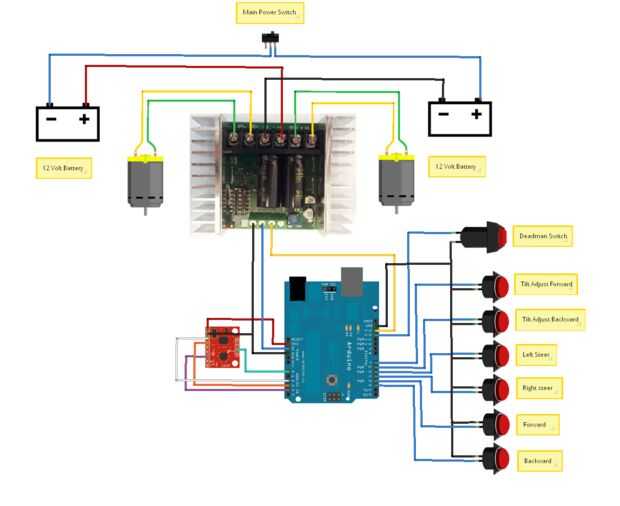
Encontrar un buen lugar seguro y fácil de usar para montar estos. Conectar todas las unidades y conectar estos según el diagrama de cableado.
El cableado es el mismo como patín de Xenonjohn pero sin las resistencias.
Consulte nuestro diagrama de circuito.
Una vez que está conectado y el código se ha subido, es tiempo para probar. Pone ladrillos ome por debajo para levantar las ruedas del suelo. Incline hacia delante y gire el interruptor central. Espere sus cuatro segundos para el Acceleromoter calibrar y mantenga pulsado el interruptor de hombre muerto. Las ruedas no deben empezar aún.
Lentamente incline la unidad hacia atrás hasta que el acelerómetro es vertical. Los motores deben poner en marcha y debería poder lentamente muévala hacia atrás y hacia adelante para reducir y acelerarlos. Controlar la rotación para asegurarse de que las ruedas van la manera correcta. Si no, luego apague la unidad y cambiar la polaridad para ese motor.
Ahora, estará preparado para conducir la unidad de todo.













