Paso 2: Conexión de Cybot y Arduino

Personalmente he leído de izquierda a derecha, pero la gente que fabricó la tarjeta de motor Cybot fue la otra manera (este fue mi primer error cuando las indicaciones de motor) una vez me di cuenta de estaba bien y todos la numeración en este instructable para el tablero de Cybot va derecha a izquierda ahora.
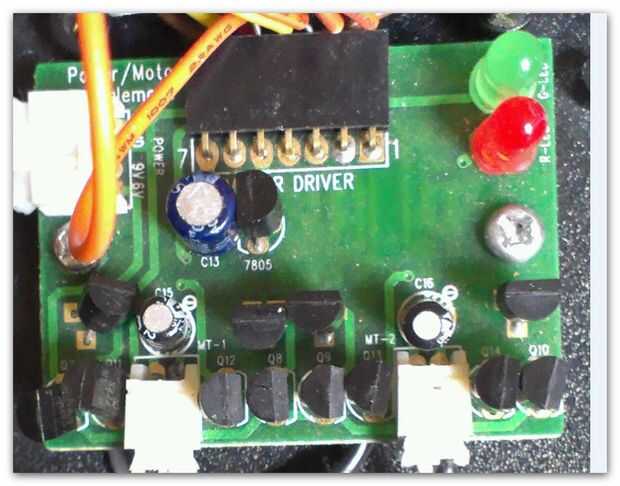
Hay 7 conexiones (el bloque negro en la parte superior de la primera foto)
| PIN | Descripción de la función |
| 1 | Motor derecha - adelante |
| 2 | Motor derecho - revés |
| 3 | Adelante la izquierda Motor- |
| 4 | Motor - la izquierda atrás |
| 5 | + 5 voltios de salida |
| 6 | + 6 voltios de salida |
| 7 | Cero voltios |
He en la actualidad sólo conectado hasta los pernos del motor y el pin 6 voltios así que pines 1,2,3,4 y 6 de la Junta de cybot.
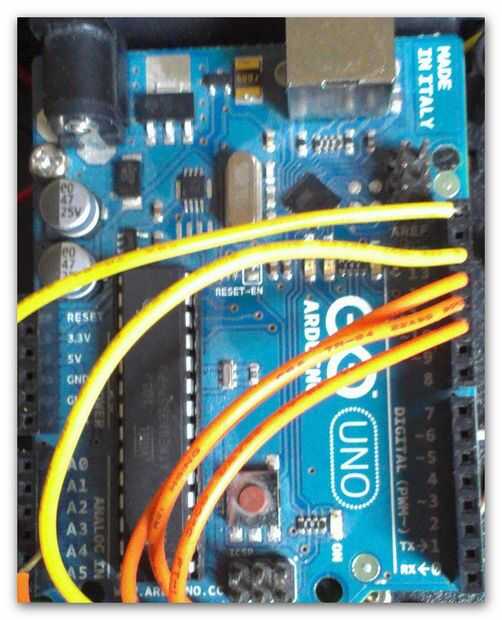
S4A tiene un número de líneas digitales predefinidos para la placa Arduino, que son conexiones encabezado 10,11,12 y 13 - conectar uno a cada uno de los Cybot pins el último pin conectado es el pin ARef de Arduino a + pin de 6 voltios del motor tablero.
para que las conexiones de pasador que he usado son los siguientes
| Cybot Pin | Pines de Arduino | |
| 1 - avance RM | Para | ~ 10 |
| 2 - RM reverso | Para | ~ 11 |
| 3 - LM avance | Para | ~ 12 |
| 4 - marcha LM | Para | ~ 13 |
| 6 - + 6 voltios de salida | Para | ARef |
Como actualmente no hay ninguna disponible bluetooth tengo un cable USB de 5 m conectado a Arduino para el bot para moverse.


")










