Paso 11: El elemento de control del controlador.
Proporcional. Se trata de una medida correctiva que escala proporcionalmente al ángulo. Si la palanca se inclina hacia adelante dos veces tan lejos, la acción correctiva es dos veces tan grande. Esto es como la "constante de resorte" del sistema, aplicando una fuerza de restauración como el palo se mueve de vertical.
Derivado de la. Se trata de una medida correctiva que escala proporcional a la derivada del ángulo o la velocidad angular. Si el palo está cayendo dos veces tan rápidamente, la acción correctiva es dos veces tan grande. Esto es como la "constante de amortiguamiento" del sistema, aplicando una fuerza que resiste la rotación en cualquier dirección.
Juntos, esto forma un sistema masa-resorte-amortiguador, excepto con amortiguadores y muelles virtuales. La constante de resorte relativo y constante de amortiguación afectan cuánto el sistema oscila como corrige el desplazamiento angular. ¿Simple, correcto? Aquí está el código:
ángulo de salida += * KP + tasa * KD;
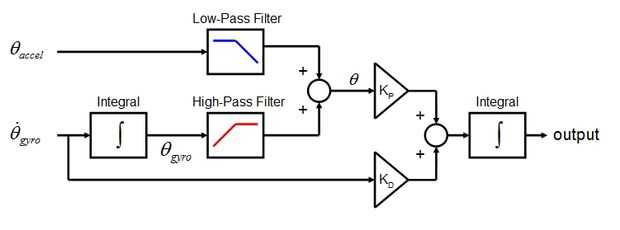
Sí, simple. salida es el comando para enviar a los motores. KP y KD son ajustados hasta que balancea (o va va totalmente inestable). Una sutileza aquí es que el comando de salida es incrementado por el valor de producción por el regulador PD. Por lo tanto, si el ángulo se lleva a cabo en algún desvío de la vertical, se sigue aumentando el comando motor. Es como añadir un integral extra al sistema, como se muestra en el siguiente diagrama de bloque.
Generalmente en diagramas de realimentación, la ruta de realimentación tiene un signo negativo, pero realmente depende de la forma que se instalan los motores. Elegir la señal de salida ya sea posible en hardware o software (= en lugar de +=) cambiando a los conductores del motor. Si ambas ruedas empezar a moverse al revés en respuesta al ángulo, puede voltear el signo. Si una rueda comienza a moverse al revés, sólo puede intercambiar sus conductores del motor.













