Paso 1: Física dice que es más fácil construir algo grande uno mismo-equilibrio.
¿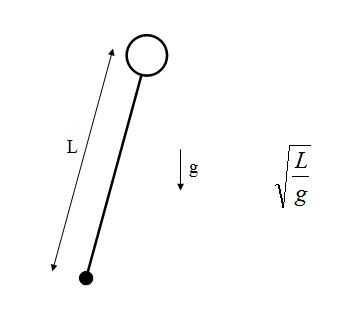
Por ejemplo, la constante de tiempo mecánica de un robot uno mismo-equilibrio pequeño es más rápida. Imagine la diferencia entre tratar de equilibrar un palo de escoba en el dedo y tratando de equilibrar un lápiz sobre su dedo. El controlador para un pequeño robot tiene ser mucho más rápido para mantenerse al día con el sistema físico.
Además, un piloto humano toma parte de la carga de la centralita, ya que la mente humana es un controlador muy bueno también. Por ejemplo, los acelerómetros utilizados en plataformas para observar el equilibrio no pueden distinguir entre parado y moviéndose a una velocidad constante, pero puede un piloto humano. El Jinete humano puede ajustar por inclinarse remite o al revés para acelerar o frenar.
Por lo tanto, este Instructable se centra en un vehículo de tamaño completo, aunque sea relativamente pequeña. En el paso final, hay algunos enlaces a robots de equilibrio.













