Paso 7: Y ahora, la parte más difícil.
¿



Normalmente, el controlador es algún tipo de microprocesador. En algunos casos raros, uno puede ser obligado por razones desconocidas que ver enteramente con circuitería analógica. Segstick en su lugar utiliza un controlador digital más convencional en el favorito de todos: el Arduino. En concreto, utiliza el Arduino Nano 3.0 de Gravitech. Pero no cualquier Arduino.
Para la detección, Segstick utiliza la IMU 6DOF de maquinilla de afeitar de Sparkfun. Realmente, sólo necesita un acelerómetro y un giroscopio eje, como se expondrá en el siguiente paso, pero este paquete es muy conveniente y permite montar el tablero de forma que desee. Puesto que utiliza todos los 3.3V sensores, necesitará ser alimentado desde el Arduino salida de 3.3V. Cada sensor genera una tensión analógica que se lee en por el convertidor analógico a digital de Arduino (ADC). Más en el paso siguiente.
Para el control de los motores, Segstick utiliza dos controladores de motor de Polulu 18v25 alta potencia . Son controladores motor reversibles minúsculos pero poderosos capaces de proporcionar hasta 25A cada uno. Decidí agregar un disipador de calor para ellos, pero parecen lo suficientemente frío como sin él. Que requieren de gran calibre cableado a la batería y a los conductores del motor del taladro.
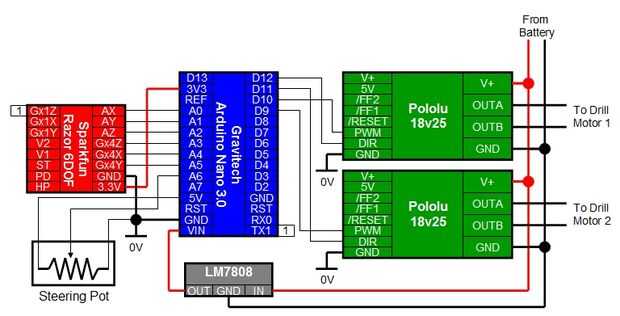
A continuación se muestra el circuito esquemático. Cómo implementan (protoboard, breadboard, placa de circuito impreso) es suya. Lo hice sobre una tabla de vectores que posteriormente cortado a la medida. Conexiones soldadas generalmente será más fiables que las conexiones tipo protoboard en un vehículo en movimiento, por lo que recomiendo utilizar zócalos para los componentes pero soldar directamente con cable conexiones.













