Paso 2: Construir la electrónica
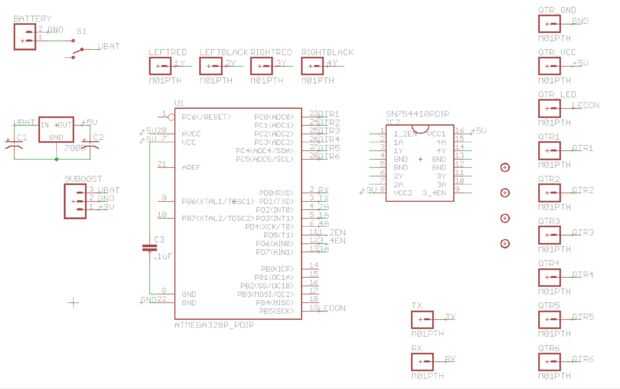

El cerebro del robot es un ATmega328, el mismo chip AVR de 8 bits usado en el Arduino Uno. El microcontrolador contiunously Lee entrada de de chip serie de 6 sensores infrarrojos, determina si es izquierda o derecha de la línea y le dice a un conductor del motor de puente H para ajustar la velocidad a los dos motores con el fin de sí mismo en la línea de centro.
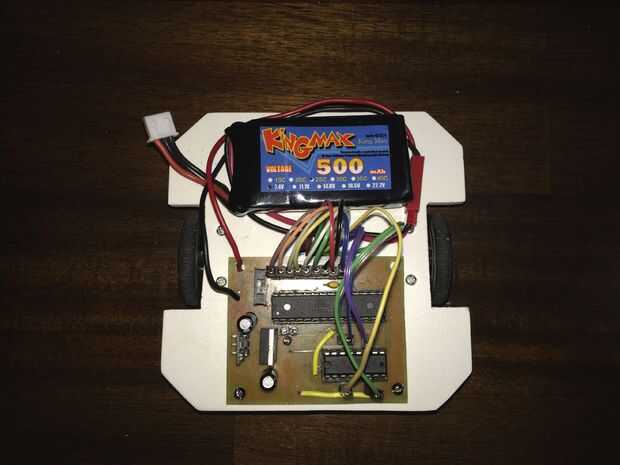
Decidí para el robot de la misma batería de 500mAh 2S LiPo como usaba en mi anterior Instructable. La batería está conectada a un interruptor y del interruptor de la alimentación se divide a dos reguladores de tensión. Uno es el regulador de conmutación elevador de 9V, que proporciona 9V a los motores, que es sobre el max que están diseñados para manejar. de Pololu (El 3pi hace esto para lograr una alta velocidad máxima, pero en mi caso fue un error porque los motores funcionar mucho más rápidamente que mi algoritmo de detección puede mantenerse, así que termino por tener que frenarlos camino hacia abajo para mantener el robot en la línea, perdiendo mucho par en el proceso.) El otro regulador del interruptor es un 5V lineal baja de deserción escolar uno, que proporciona un 5V constante para los tres chips de lógica. Así que empieza con 7-8V de la batería (dependiendo de la carga), paso parte de él hasta 9V para los motores y parte de él hasta 5V para todo lo demás. (Para mi próxima versión ¡ sólo ejecutar todo desde una fuente de 5V batería y saltar los reguladores!)
Al lado del conductor del motor son 4 pines externos, dos para el motor izquierdo y dos para el motor adecuado. Sobre el micro controlador son 9 pines conectar el IR sensor de matriz - de seis para los sensores, más positivo, tierra y un pin de activación que podría utilizar para apagar los LEDs de IR para ahorrar energía, aunque hasta ahora yo solo he mantenido.
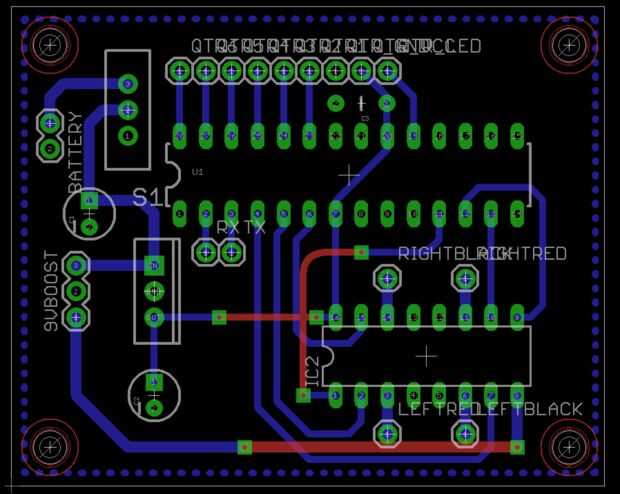
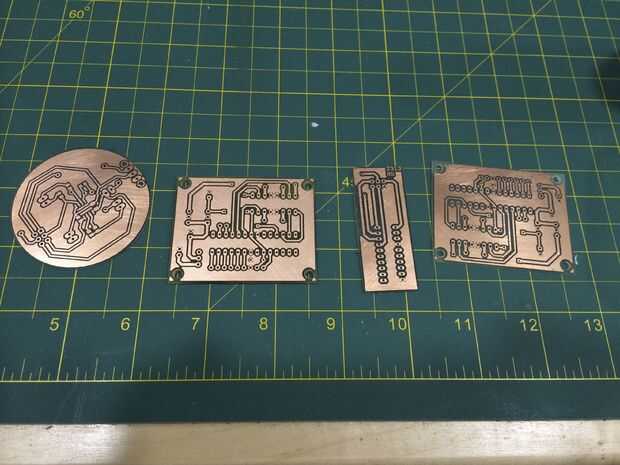
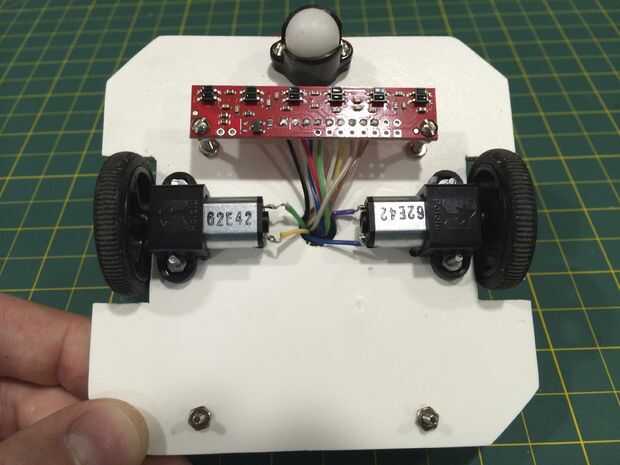
Diseñe el PCB en Eagle y luego había grabado con sistema de transferencia de tóner de Pulsar Pro FX. Os adjunto la batería a la base con potencia industrial velcro. El PCB se une con tornillos 2-56, aunque absolutamente no dejo espacio suficiente para colocar a ambos lados (otro arreglo para la siguiente versión). Os adjunto la matriz del sensor en la parte inferior también con tornillos 2-56, pero con 2 tuercas en cada lado de la base para que pudiera controlar la altura, que es necesario sentarse 1/4" o menos levantadas del suelo.





")







