Paso 10: Promedio ponderado
Este es uno de los algoritmos más importantes que utilizaremos para hacer el seguidor de línea de alto rendimiento lo mejor posible. El promedio de ponderado (puede buscar sobre él en Wikipedia) es un promedio donde cada parte de sus términos tiene un peso de importancia diferente. Los miembros de la media con mayor valor más influyen en el resultado de la ecuación, mientras que los que tienen un valor más bajo la influencia sólo ligeramente. ¿Por qué tenemos que utilizar este tipo de media? Porque nosotros no hacer un seguidor de línea simple con algo tan simple como esto
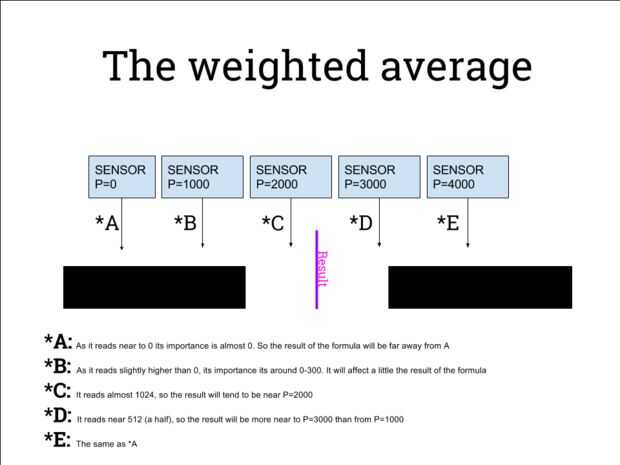
Estamos haciendo un robot de alto rendimiento, así que tenemos que calcular una estimación precisa de donde es el centro de la línea que estamos siguiendo. ¿Cómo la calculamos? Con el promedio ponderado. Nos pondremos los valores de cny70 5 centro en cada ciclo de programación, (cada uno de estos valores va de 0 negro a 1024-blanco), y tendremos que transformar estos 5 valores a un único valor que dice Dónde está el centro de la línea que estamos siguiendo. Para llegar a nuestro objetivo le asignamos un valor de posición a cada sensor. Este valor de la posición se define como el valor de que la fórmula le daría si el centro de la línea se centra exactamente en el centro del sensor. Por supuesto esto es teórico pero cada sensor intentará hacer que el valor de posición es cerca de su valor. Si un sensor Lee más blanco que el otro, el resultado de la fórmula será más cerca de su posición de valor que el otro.
Así, de los 5 sensores, el sensor de primicias se asignará 0 mientras la quinta 4000. Esto significa que el valor de la posición a leer va a ser en el rango de 0-4000. 2000 significa que la línea está exactamente en el centro de la matriz del sensor. Si el robot detecta que sólo hemos perdido la pista entonces el valor de la posición se establecerá en 0 o 4000 por consiguiente hasta el último valor leído. En este caso llaman el primer sensor -2000 y el quinto sensor 2000 y luego redujo la gama de - 2000,2000 a-200,200

")











