Paso 6: El línea circuitos detectores

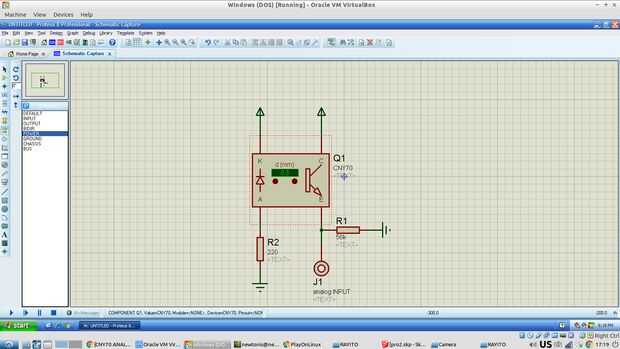
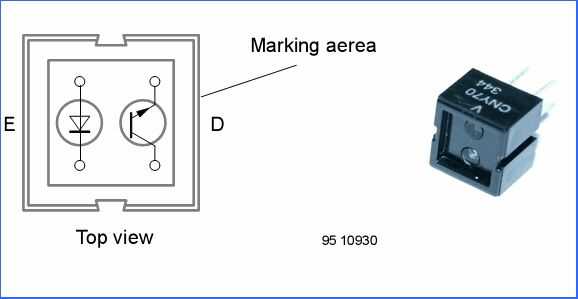
Bueno, ahora empezaremos a construir circuitos del robot. Empezaremos construyendo los sensores que detectan los colores de piso (desde el blanco al negro). Hemos unido ruedas dos bolas a la base del robot para asegurarse de que todos los sensores son siempre a la misma distancia del piso. ¿Qué componentes necesita? En realidad utilizamos 9 sensores cny70 (estoy seguro 7 o 5 puede estar bien), resistencias de ohm 9 220 y resistencias de pull-down de 9 56 k. Usted puede encontrar todos estos componentes en http://www.digikey.com/ o cualquier proveedor electrónico. He adjuntado una imagen del circuito para un sensor cny70 sola y también el pdf de tablero de circuito impreso (si desea utilizar mi circuito) y el modelo de proteus (si desea modificarlo, pero necesitarás proteus 8.2 que no es software libre).
El objetivo de este circuito es obtener el valor de detección analógica de cada cny70 que va de 0 a 5v, donde 0v significa negro, y 5v totalmente blanco. El cny70 da una precisión de 0 al 1024, así que cuando te lea esta información para el micro controlador vamos a llegar a un número entero entre 0 y 1024 que nos informará el color, siendo leído por este sensor.
Hay 11 pins macho salir del circuito. Dos de ellos son la referencia de tierra y la fuente de alimentación de 5v, y los otros 9 son la senors salida analógica (1 por cada uno). Esto no es un circuito complejo, sólo copia de nueve veces el circuito esquemático de la imagen. Tenga cuidado de todos los sensores en la parte derecha de la soldadura.
Nota: Si desea que puede utilizar otras alternativas más que el sensor cny70, hay algunos de ellos con el mismo pinout (que son, por ejemplo, el más pequeño).
También usé diferentes cantidades de sensores cny70 durante el desarrollo del robot
- Primero utiliza 7 sensores con 1 sensor extra en la frontera para detectar una señal blanca (que se da en algunas competiciones. Es como este) < - el programa voy a explicar lo use en esta versión, pero es posible adaptarlo para que sea más sencillo o más complejo
- Entonces empecé a usar solo 5 sensores propone la siguiente línea (que todavía es bastante) y dejar sin uso dos de los sensores mientras que realmente empecé a usar los 2 sensores adicionales en la frontera para detectar dos señales blanco (uno a cada lado)

")











