Paso 4: El chasis

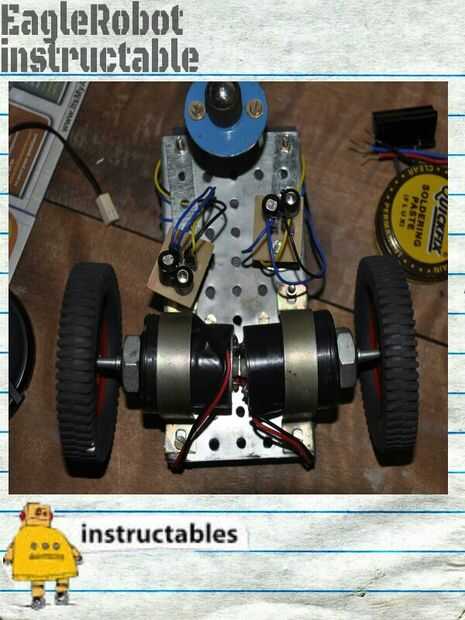

Ahora que la electrónica se hace sobre todo, permite avanzar hacia el chasis. Me
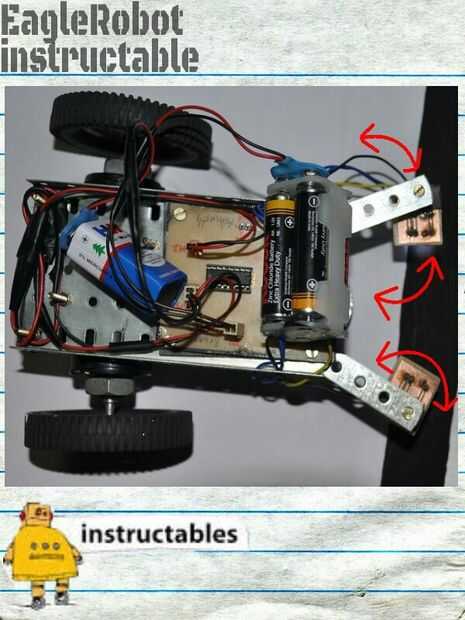
utilizar la misma placa de Mecano como la última vez. Para los sensores, también utilicé una pieza de Mecano. Nota algunas diferencias en las fotos que vas a ver y el robot real. Las fotos de abajo muestra la parte de 4 agujeros. I sustituirá esta con un agujero de 5 uno más adelante. También moví el PCB hasta el frente como los cables no eran lo suficientemente largos. Finalmente tuve que cambiar las ruedas ya que esta construcción era muy inestable. A ver las correcciones en la última foto. Para las conexiones, he utilizado cables de puente mujer como estas
Antes de fijar los PCB en la base, asegúrese de que ponga algo
proteger el lado de cobre. Tenemos una capa pero mejor estar seguro que lamentarlo. He utilizado trozos de cartón.
")












