Paso 1: Sensor (ojo) QTR 8RC


Gracias alchippara la fabricación de este sensor impresionante.
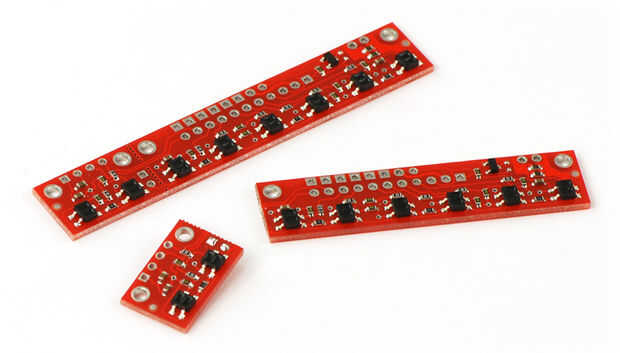
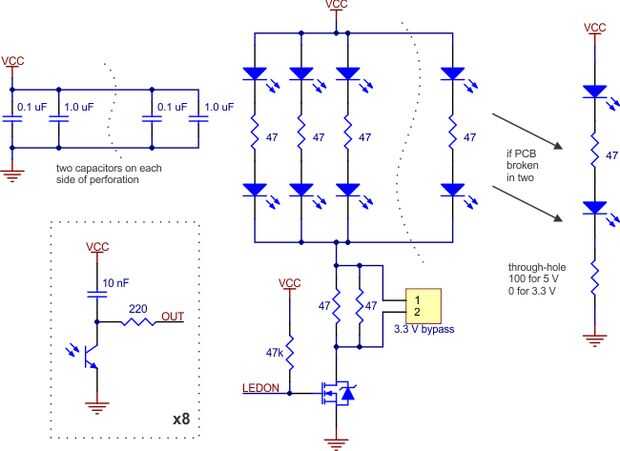
El módulo es un conveniente soporte para ocho emisor de infrarrojos y pares de receptor (fototransistor) espacian uniformemente a intervalos de 0,375"(9,525 mm). Para utilizar un sensor, debe cargar primero el nodo de salida (carga del condensador) aplicando una tensión a su pin de salida. A continuación puede leer la reflectancia retirando el voltaje suministrado externamente y tiempo cuánto tiempo tarda la tensión de salida a la descomposición por el fototransistor integrado. Menor tiempo de decaimiento es una indicación de una mayor reflexión. Este enfoque de medición tiene varias ventajas, especialmente cuando se combina con la capacidad del módulo QTR-8RC para apagar el LED de alimentación:
- No hay convertidor de analógico a digital (ADC) se requiere.
- Mejoras en la sensibilidad salida analógica divisor de tensión.
- Lectura paralela de múltiples sensores es posible con la mayoría de microcontroladores.
- Lectura paralela permite uso optimizado de la opción de activar la energía LED
Especificaciones
- Dimensiones: 2,95 "x 0.5" x 0.125 "(sin cabecera pins instalados)
- Voltaje de funcionamiento: 3.3-5.0 V
- Corriente: 100 mA
- Formato de salida: 8/O-compatible las señales digitales que pueden ser leídas como un pulso alto tiempo
- Óptima distancia de detección: 0.125"(3 mm) máximo recomendado distancia de detección: 0,375" (9.5 mm)
- Peso sin pernos de cabecera: 0,11 onzas (3,09)
Conexión de las salidas de QTR-8RC a las líneas de E/S digitales
El módulo de QTR-8RC tiene ocho salidas de sensor idéntico que, como el paralaje QTI, requieren una línea de I/O digital capaz de conducir la línea de salida alta y luego midiendo el tiempo de la tensión de salida a la caries. La secuencia típica para la lectura de un sensor es:
- Encender LEDs IR (opcional).
- Coloque la línea I/O a una salida y conducir alto.
- Permiten por lo menos 10 μs para el sensor de salida aumente.
- Realizar la entrada-salida línea de entrada (alta impedancia).
- Medir el tiempo de la tensión a la descomposición en espera la línea I/O ir bajo.
- Apagar LEDs de infrarrojos (opcional).
Estos pasos por lo general pueden ejecutarse en paralelo en múltiples líneas de la entrada-salida.
Con una fuerte reflexión, el tiempo de relajación puede ser tan bajo como varios docena microsegundos; con ninguna reflexión, el tiempo de relajación puede ser hasta algunos milisegundos. La hora exacta de la caries depende de características de la línea I/O de su microcontrolador. Resultados significativos pueden estar disponibles dentro de 1 ms en casos típicos (es decir, cuando no intentando medir diferencias sutiles en escenarios de baja reflectancia), permitiendo hasta 1 kHz de muestreo de todos los sensores de 8. Si la menor frecuencia muestreo es suficiente, se puede observar gran ahorro de energía apagando el LED. Por ejemplo, si es aceptable una frecuencia de muestreo de 100 Hz, los LEDs pueden ser 90% del tiempo, bajando el consumo promedio actual de 100 mA a 10 mA.



")








