Paso 3: Construcción de circuito y descripción
3 partes principales
nuestro circuito:
(1) placa de circuito para el controlador
(2) placa de circuito para motores
(3) puentes de H
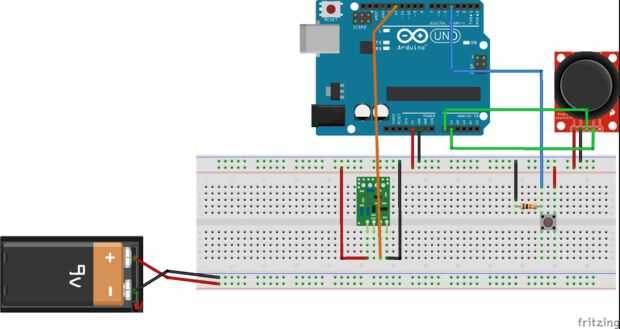
(1) pin 12 de Arduino 1
enlaces a antena pin ATA0 mientras que los otros 2 puertos de antena conectar a 5v y masa de Arduino 1. PIN A0 y A1 del 1 Arduino conectan el joystick. Otros 2 pernos de palanca de mando enlace a 5V y tierra. Una batería de 9V es zip-ligado a Arduino 1 y es la fuente de alimentación.
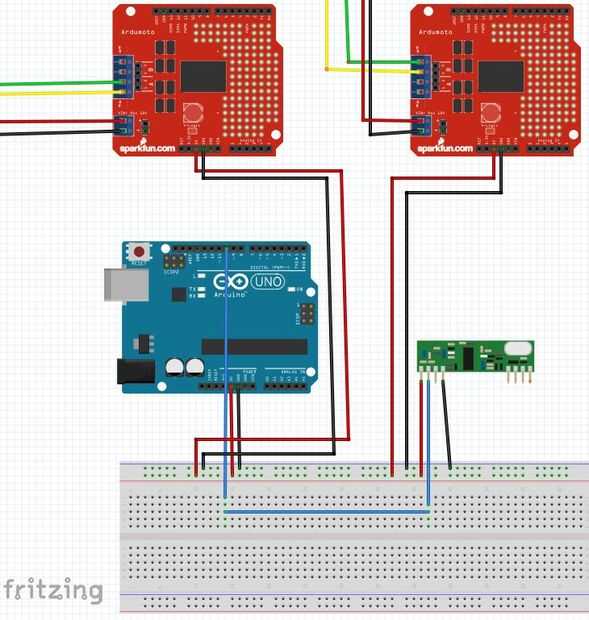
(2) en el pin 10 del Arduino 2
enlaces al pin de datos del receptor de la antena. Los otros 2 pines se unen a 5V y tierra. Pernos de 3, 5, 6, 8, 9, 11, están relacionados con puente H 1 y 2. Estos pines pines PWM de Arduino y son importantes para la variable velocidad de los motores.
(3) puente H 1 se une a la pila 1 y Motor 1. Las patillas in1 y in2 están conectadas a los pines 5 y 6 de la 2 de Arduino. Out1 y Out2 del puente en H 1 se une a ambos conductores de 1 Motor DC. El pin de la ENA está conectado a pin 3 en Arduino 2.
Puente de H 2 se une a la pila 2 y Motor 2. Las patillas in3 y in4 están conectadas a los pines 8 y 11 de la 2 de Arduino. Out3 y Out4 de puente de H 2 se une a ambos conductores de CC Motor de 2. El pin ENA se une a pin 9 del Arduino 2.
Descripción:
El 2 de Arduino es el controlador central para toda la parte excepto el módulo joystick. Los puentes de H se enganchan tanto al Arduino 2 para señales de control. Esto permite que los motores de CC ir hacia adelante y hacia atrás. Tiene 2 puentes de H permite que los motores que funcionan por separado. El módulo de la palanca de mando es inalámbrico y sirve a los motores cuando ir hacia atrás o hacia adelante usando diferentes direcciones.










")

