Paso 3: Cableado del controlador DRV8833

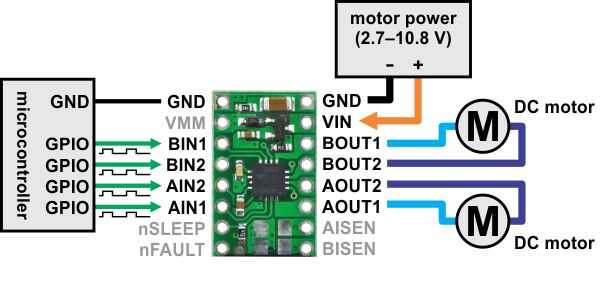
Colocar las clavijas de alimentación:
Introduzca la DRV8833 en la protoboard.
Conecte el pin GND izquierdo (junto a la clavija de Vmm) en el DRV8833 a la tierra del Arduino.
Conecte el pin GND derecha (al lado del pin Vin) en el DRV8833 a cable (negro) negativo de la cuatro AAA.
Conecte el pin Vin (al lado del pin de Bout1) en el DRV8833 al cable (rojo) positivo de la cuatro AAA.
Colocar el pin de nFAULT:
Conecte el pin de nFAULT (al lado del pin de nSLEEP) en el DRV8833 al pin digital 12.
Conectar las entradas:
Conecte la clavija Ain1 en el DRV8833 a digital 5.
Coloque el pasador Ain2 el DRV8833 digital 6.
Coloque el pasador Bin1 el DRV8833 digital 9.
Fije el perno Bin2 en la DRV8833 digital 10.
Colocar las salidas:
Conecte el pin de Aout1 en la DRV8833 a la terminal positiva del motor derecho.
Coloque el pasador de Aout2 en la DRV8833 a la terminal negativa del motor derecho.
Conecte el pin de Bout1 en la DRV8833 a la terminal positiva del motor izquierdo.
Coloque el pasador de Bout2 en la DRV8833 a la terminal negativa del motor izquierdo.
Si tienes cualquier duda sobre la DRV8833, visita aquí.




")


![Cómo hacer un vehículo de tres ruedas [chasis robot]](https://foto.askix.com/thumb/170x110/3/4c/34ccca77f5a793857499558645805d4d.jpg "Cómo hacer un vehículo de tres ruedas [chasis robot]")
")




")