Paso 4:
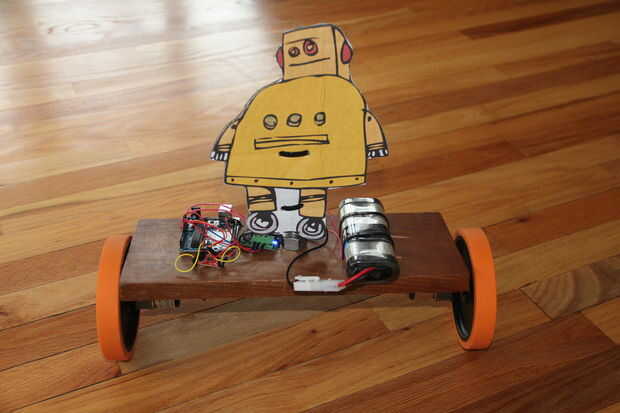
He hecho un uno mismo-equilibrio, segway-como robot. El robot trabaja por lecturas del acelerómetro en la dirección x, conversión a digital, luego ponerlos en una fórmula que convierte los motores una velocidad específica para conseguir que la derecha sí mismo.
¿Cómo lo hiciste?
Yo he querido desde hace tiempo hacer un tamaño completo paseo en segway pero decidió empezar con una versión más pequeña para obtener algunas ideas para una versión a gran escala. Para hacerlo, utilicé un taladro, soldador, equipo para programar el Arduino, acelerómetro, el controlador del motor, destornillador y mucho ingenio.
¿Dónde lo hizo?
Hice el robot todo en casa.
¿Qué aprendiste?
Antes de este proyecto, que no había hecho un montón de cosas con acelerómetros para que este proyecto me dio una gran oportunidad para aprender acerca de ellos. También, serie envía al controlador de motor tuvo algún pensamiento y trasteando con el programa de ordenador que era un reto. Me sentí más orgulloso de conseguirlo para equilibrar. La mayor sorpresa fue lo difícil que fue obtener el código justo.











")

