Paso 5: Prueba
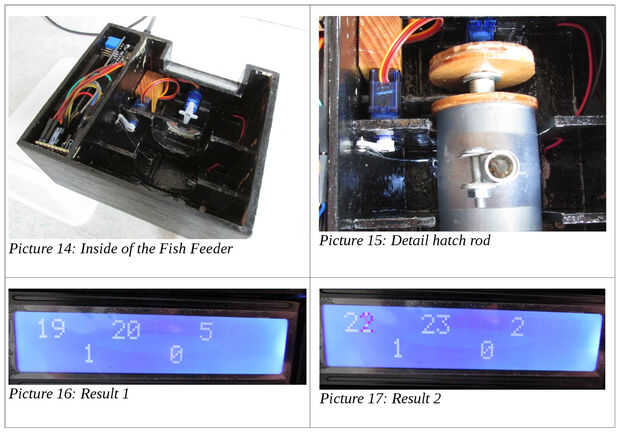
Después de montar el sensor de matriz, un alambre de un clip puede ser insertado entre la portilla y servo. Después de una primera prueba ejecutarla el tornillo del servo Portilla interfirió con la pinza el tubo de alimentación. Si esto sucede, clip de una parte del tornillo y revertir la pinza el tubo de alimentación, véase el cuadro 14.
El programa de Arduino ejecuta una secuencia de pasos, ver también anexo programa:
-Abrir la escotilla
-Delviver comida al acuario
-Cerrar la escotilla
-Calcalate el índice de alimentos
El programa que se ejecuta en el Arduino mide la resistencia de la LDR antes de lanzar la comida en el acuario. Si la resistencia de la LDR disminuye por debajo del umbral el programa asume que el alimento ha sido liberado. Un contador muestra cuantas veces ha ocurrido esto. Esto da una buena indicación en cuanto se entrega a los peces.
He hecho varios test y los resultados son constante, entre 40 y 50, ver cuadro 16 y 17. Dependiendo de su propia configuración, este número índice puede ser diferente.
Nota: El programa de Arduino conectado es un reemplazo del programa FishFeeder si utiliza la matriz de LDR.








")




