Paso 1: Idea, creación de prototipos e iteraciones

(Este paso documenta el proceso de desarrollo y puede ser saltado).
Idea
El objetivo era construir un cubo que es consciente de su orientación en el espacio (o por lo menos qué lado apunta hacia arriba), sin utilizar un acelerómetro.
Sensores de inclinación estándar 1D no son mucho más que una bola en un tubo, así que pensé que esto se podría generalizar a tres dimensiones. Tenga en cuenta que utilizando tres sensores de 1D probablemente no funcionaría, como orientaciones muchos dejaría a algunos de los interruptores en un estado indefinido flotante.
Así que la idea era hacer una sola bola en el lado del cubo hacia abajo. Como en el caso de la 1 D la gravedad es tu amigo aquí. Todo lo que necesitas es una cámara interior que sostiene la bola, con un vértice por cada lado del cubo.
Creación de prototipos
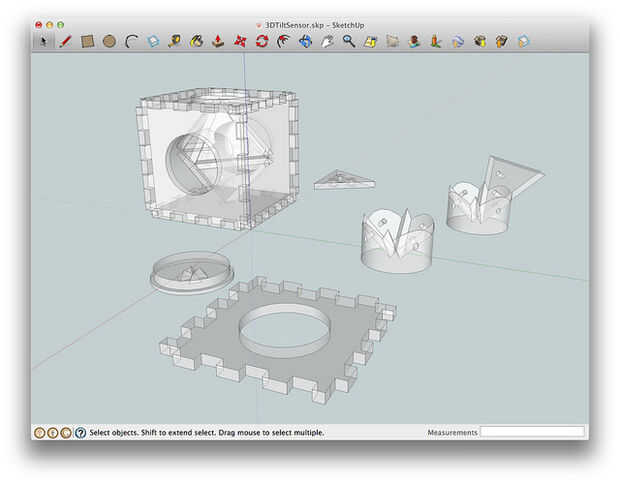
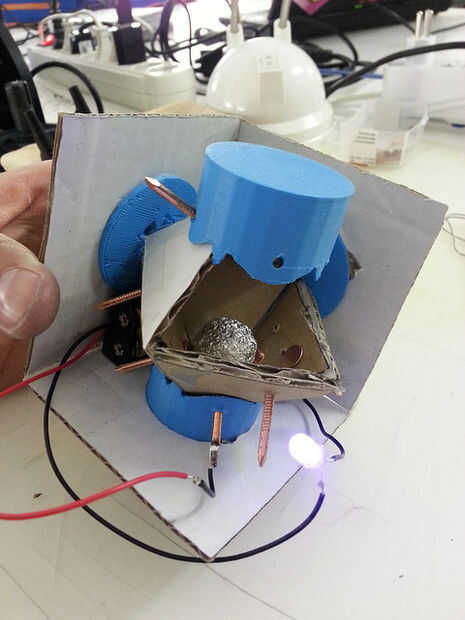
Fue construido probar la idea de un prototipo rápido de cartón "cortadas". Esto parece funcionan según lo previsto, así que comencé a diseñar el cubo en Sketchup. Sólo entonces me di cuenta de que la cámara interior no es un cubo y un octaedro.
Para probar el interruptor (a base de clavos) una bola de aluminio improvisado fue utilizada con un LED y una batería.
Iteraciones
A menudo es difícil conseguir todo derecho en el primer intento.
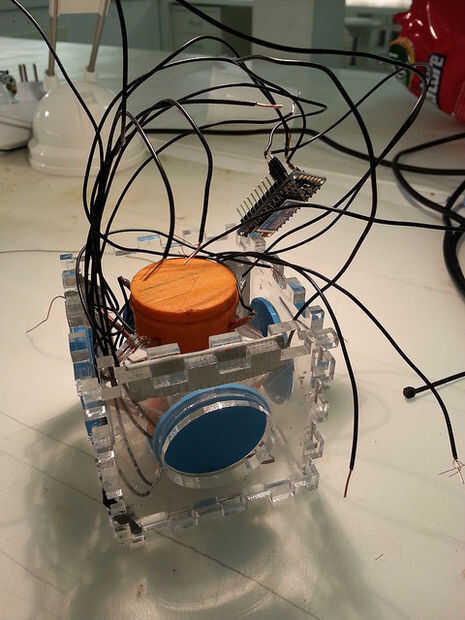
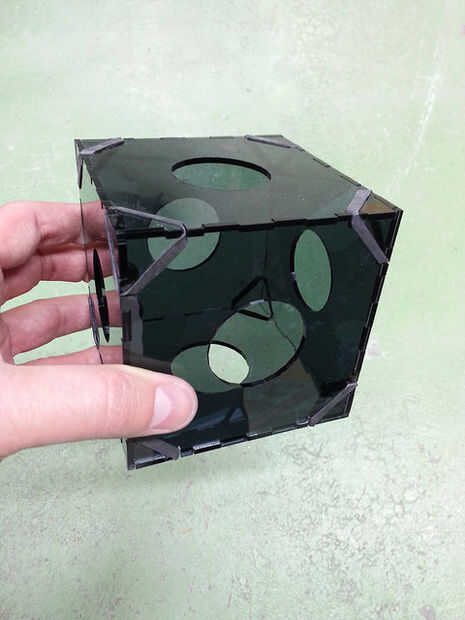
En este caso resultó que el tamaño elegido para el cubo y la cámara no permite suficiente espacio para la electrónica. También, el acrílico grueso tardó demasiado cortado con láser. Una iteración adicional era necesario agregar cortes pequeños para las bandas de goma mantiene todo juntos. La solución es sencilla: iterar hasta que funciona.



")









