Paso 4: Código
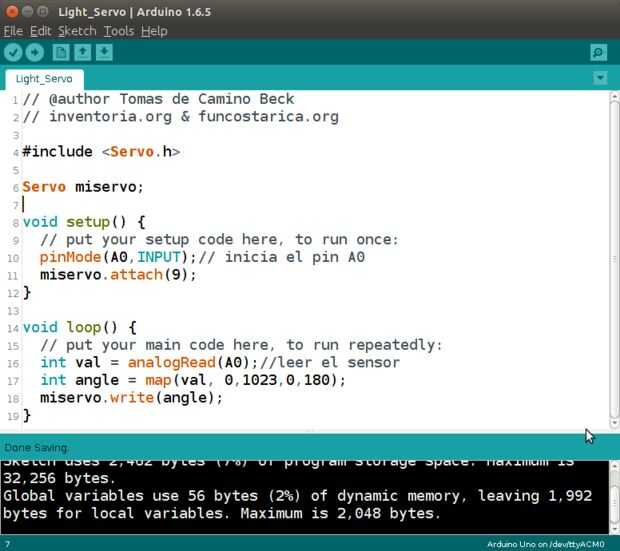
El código es directo, pero hay cargar lo se llama una "librería". Una librería es una porción de código escrita por alguien facilita escribir nuestro código y nos evita programar detalles. En este caso usamos la libreria "Servo.h" viene incluida en el IDE de Arduino, así que no hay nada instalar. En la línea 4, se utiliza la directiva "#include" para incluir esa librería en nuestro código. En la línea 6, creamos un "objeto" tipo servo llamamos "miservo", será ese lo servo de la nuestro cuántos para controlar las acciones de.
La línea 10 es para iniciar el pin A0, y la línea 11 le asignamos un "miservo" el pin 9, utilizando "miservo.attach(9)".
En la línea 16 vive la información del sensor, en la línea 17 se convierte (usando la función "mapa") de escala 0-1024, un escala de 0-180 mapa los 180 grados gira el motor. En la línea 18, le indicamos al código el servo debe moverse a la posición indicada por "ángulo".

")



")







