Paso 1: una versión simple con transistores bipolares

el punto de la operación es:
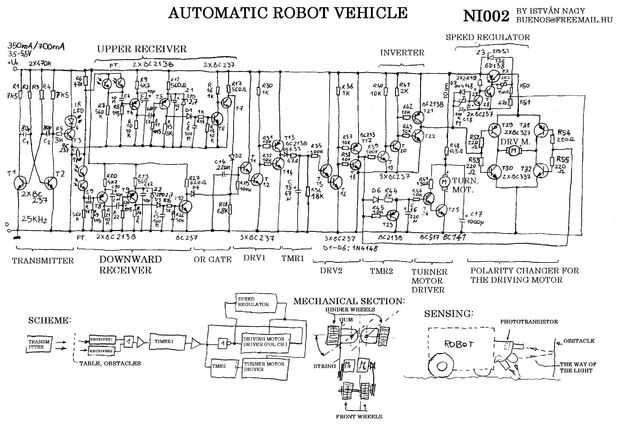
1. un oscilador genera una onda cuadrada.
2. infrarrojo led con ángulo estrecho transmite esta señal como luz/rayos infrarrojos.
3. reflejo de obstackles en el ángulo de visión, básicamente desde una visión punto en la tierra, o enfrente del robot.
4. hay un fotodiodo o fototransistor al lado del LED IR, también estrecho ángulo apuntado al mismo lugar como el LED. fototransistor se utilizó en la versión bipolar y el fotodiodo en la versión de IC.
5. hay un circuito receptor conectado al sensor, detecta si hay refleja señal o no.
6. Si hay una señal (dentro de una banda de frecuencia especificada, como 150khz - 5khz), entonces la salida va a alto nivel de lógica, de lo contrario a bajo nivel. Esta señal puede ser utilizada por un microcontrolador, o por una lógica de control analógico. hay señal si hay una obstáculo y tierra dentro de la gama de detección, que es cerca de 5-15 centímetros.

 - Tutorial de Arduino")

 para la operación de rescate")
 para Arduino")




 campaña para la oficina (con un robot RC y junkbots)")



