Paso 2: Configuración del Hardware

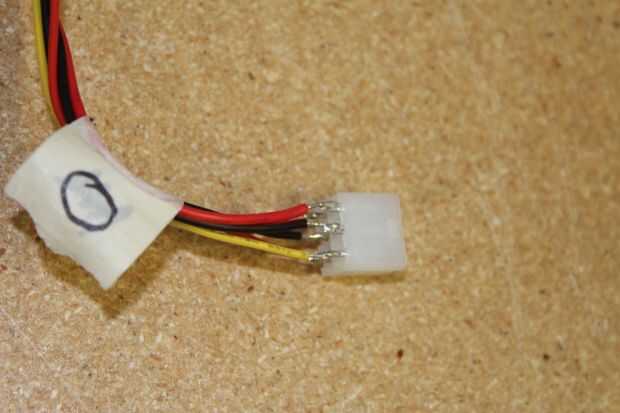
Los sensores de efecto hall tienen 4 cables: 5V, GND y 2 cables de señal. Cada cable de señal emite pulsos como el motor gira. También están los dos cables del accionador para conectar a la MegaMoto. Sólo estamos usando una de las señales de efecto hall.
Conexión como sigue:
-Cable rojo a 5V
-Cable a tierra negro
-Alambre amarillo/naranja a Arduino pin 2 o 3 (importante)
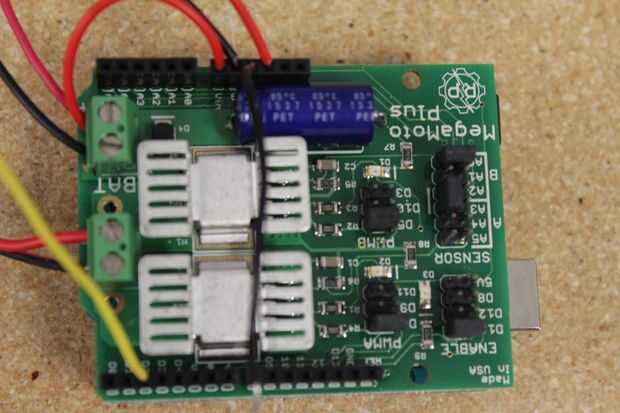
- Cable de actuador rojo con MOTA de la MegaMoto
-Actuador negro alambre de MOTB de la MegaMoto
Asegúrese de comprobar el inicio del código en el paso siguiente. Asegúrese de que los puentes de la MegaMoto y el efecto de pasillo sensores se fijan a los pins correctos. Asegurar que "hall0" y "hall1" corresponden a la correcta MegaMotos (PWMA0 y PWMA1 respectivamente).
Una vez que los motores están conectados correctamente a los tableros, cable como sigue:
-Conectar 12V al BAT +
-Conectar el GND al BAT-
-Conectar 12V a Vin en la debida
- Dos botones de alambre entre los pines 7 y 8, si se conectan a GND
La selección de pines de Arduino de 2 o 3 es crucial. La Arduino Uno posee 2 pines de interrupción que pueden ser utilizados. Si tienes un Arduino Mega tienes 6 interrupciones que pueden ser utilizados (2, 3, 18, 19, 20, 21) y con una debida se puede utilizar cada pin como una interrupción. En el siguiente paso a mirar la programación que permitirá a estos pines como interrupciones.




")


")
")




