Paso 4: Control de posición
Ahora que hemos visto una interrupción básica podemos expandirlo para controlar el motor. Nos va a usar una sola variable y luego dependiendo si el actuador es ir remite o al revés vamos a añadir o restar el valor.
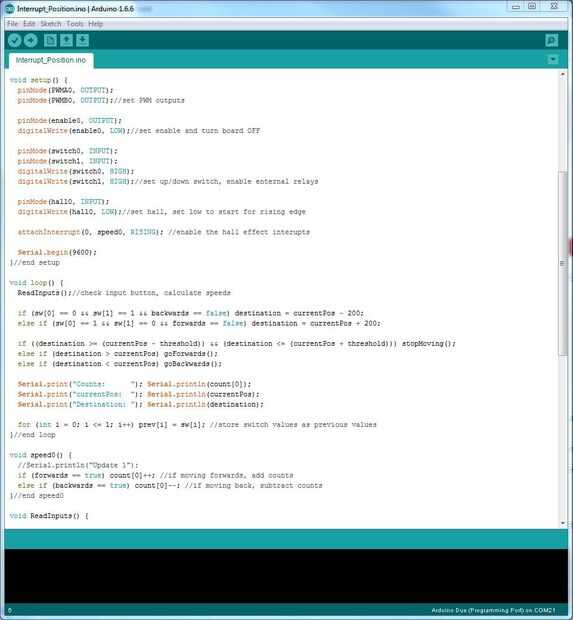
La subrutina speed0() se vinculará a la interrupción. Conocer la posición actual y calcular la posición de destino sabemos que dirección enviar el motor. Tenga en cuenta que las cuentas no pueden ser perfectas. Si ejecuta el motor durante mucho tiempo hacia adelante y hacia atrás pueden perder una cuenta aquí y allá y lentamente pierde la noción de donde estás. Vamos a utilizar una rutina autoguiados hacia el blanco (ver siguiente paso) para ayudar a mantener todo bajo control.
El código adjunto desplacen el servomotor hacia delante o hacia atrás por una cantidad fija cuando presionas los botones en el pin 7 y 8 (activo bajo). Usted puede probar mediante un alambre conectado a tierra.
Ver el código adjunto a continuación para más detalles.
#define PWMA0 6 #define PWMB0 5 #define enable0 13 //pins for first MegaMoto #define switch0 7 //Up button #define switch1 8 //Down button #define hall0 2 //interrupt pins for hall effect sensors int enable = 0; //enable pin for megaMoto int count[] = {0};//Actuator int sw[] = {1, 1}; //switch up, switch down int prev[] = {0, 0};//previous switch state int currentPos = 0;//current position int threshold = 1; int destination = 0; bool forwards = false; bool backwards = false;// motor states bool firstRun = true;//first run of the motor once the button is pushed void setup() { pinMode(PWMA0, OUTPUT); pinMode(PWMB0, OUTPUT);//set PWM outputs pinMode(enable0, OUTPUT); digitalWrite(enable0, LOW);//set enable and turn board OFF pinMode(switch0, INPUT); pinMode(switch1, INPUT); digitalWrite(switch0, HIGH); digitalWrite(switch1, HIGH);//set up/down switch, enable enternal relays pinMode(hall0, INPUT); digitalWrite(hall0, LOW);//set hall, set low to start for rising edge attachInterrupt(0, speed0, RISING); //enable the hall effect interupts Serial.begin(9600); }//end setup void loop() { ReadInputs();//check input button, calculate speeds if (sw[0] == 0 && sw[1] == 1 && backwards == false) destination = currentPos - 200;//dont change destination while moving else if (sw[0] == 1 && sw[1] == 0 && forwards == false) destination = currentPos + 200;//dont change destination while moving if ((destination >= (currentPos - threshold)) && (destination <= (currentPos + threshold))) stopMoving();//stop if you're close enough else if (destination > currentPos) goForwards();//move if you need to else if (destination < currentPos) goBackwards();//move if you need to for (int i = 0; i <= 1; i++) prev[i] = sw[i]; //store switch values as previous values }//end loop void speed0() { if (forwards == true) count[0]++; //if moving forwards, add counts else if (backwards == true) count[0]--; //if moving back, subtract counts }//end speed0 void ReadInputs() { sw[0] = digitalRead(switch0), sw[1] = digitalRead(switch1);//check switches currentPos = count[0];//set where you are }//end read inputs void goForwards() { forwards = true; backwards = false;//set travel direction digitalWrite(enable0, HIGH);//enable board analogWrite(PWMA0, 255); analogWrite(PWMB0, 0);//apply speeds }//end goForwards void goBackwards() { forwards = false; backwards = true;//set travel direction digitalWrite(enable0, HIGH);//enable board analogWrite(PWMA0, 0); analogWrite(PWMB0, 255);//apply speeds }//end goBackwards void stopMoving() { forwards = false; backwards = false;//set travel direction analogWrite(PWMA0, 0); analogWrite(PWMB0, 0);//set speeds to 0 delay(10); digitalWrite(enable0, LOW);//disable board }//end stopMoving




")


")
")




