Paso 1: Configuración del Hardware

La primera cosa que es diferente de la parte 1 es que estamos utilizando un Arduino Due. El tiene 2 procesadores, con uno que se dedica a interrupciones. Esto nos permite fijar interrupciones a cualquier pin como lo inicializó correctamente en el código. La deuda también es necesario si usted está realizando la sincronización motores más de 2. Las cuentas de encoder están demasiado rápidas, así que si tienes más 2 motores suministro de pulsos, se necesita un procesador más rápido de la deuda para no perder cuenta.
La segunda diferencia es que estamos utilizando una fuente de alimentación más grande. Compruebe el consumo de energía de todos los motores que está controlando y asegúrese de que el adaptador de red puede proporcionar suficiente corriente. Había también ser una empresa mucho más grande para dar cabida a múltiples motores.
Es necesario que los sensores de efecto hall de alambre del mismo modo que hicimos en la parte 1. Sólo vamos a utilizar 1 señal de efecto hall por actuador.
Los cables como sigue:
-Cable rojo a 5V
-Cable a tierra negro
-Cable amarillo al pin de interrupción de Arduino
-Actuador rojo alambre a MOTA de la MegaMoto
-Actuador negro alambre de MOTB de la MegaMoto
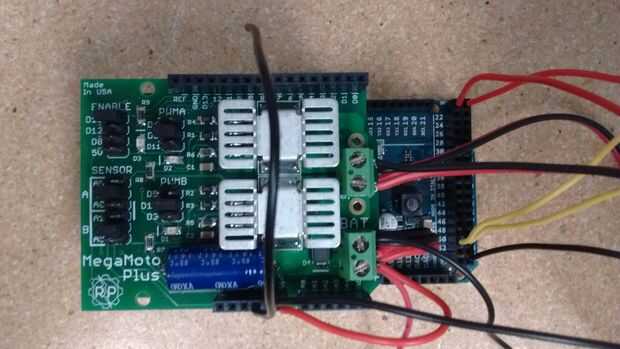
Compruebe el inicio del código en el siguiente paso y garantizar que los puentes de la MegaMoto se establecen en los pines correctos y que los sensores de efecto hall se fijan a los pins correctos. Asegurar que "hall0" y "hall1" corresponden a la correcta MegaMotos (PWMA0 y PWMA1, respectivamente).
Una vez que los motores están conectados correctamente a los tableros, cable como sigue:
-Conectar 12V al BAT +
-Conectar el GND al BAT-
-Conectar 12V a Vin en la debida
-Dos botones entre los pines 7 y 8, conectando a tierra del alambre




")
")

")





