Paso 5: Programación de actuadores múltiples

Este segundo código es una modificación de la primera. Cambia todos los ajustes de velocidad y las lecturas de corriente uso de loops y arreglos de discos que se pueden monitorizar varios actuadores. Como estamos usando actuadores múltiples, vamos a dividir los puentes H de las MegaMotos en medio puentes y utilizar relés para aplicar la dirección. Ver este Instructable (paso 4) para más detalles de cableado la MegaMoto con relés. Usted también necesitará distribuir la energía a todos los sensores de efecto hall. Usar un protoboard pequeño por lo que tiene bastantes lugares para conectar todos los cables GND y 5V.
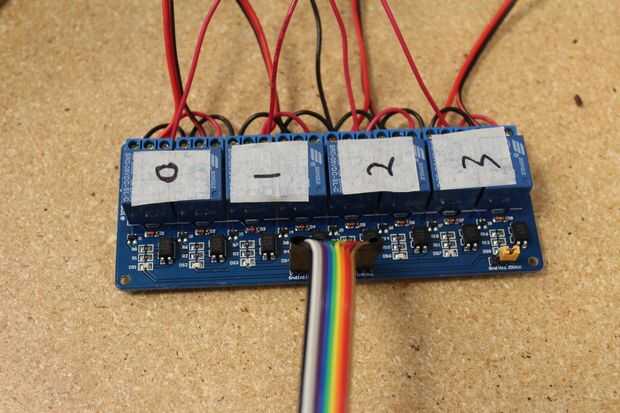
Una vez que se unen los relés, asegúrese de que los puentes MegaMoto están ajustados correctamente. Estamos utilizando los sensores actuales partidos aparte para medir cada mitad del puente H. Vea el código siguiente. Amp0 controlará la corriente del actuador conectado a PWMA0. Amp1 supervisará amp3 monitores PWMB1, amp2 monitores PWMA1 y PWMB0. Asegúrese de que los sensores de efecto hall correcto están conectados a los pines correctos también.




")
")

")





