Paso 1: Control PID

Antes de profundizar en la programación de control del PID, necesitamos saber lo que es. PID significa proporcional integral control derivativo. Es un método de control utilizado en circuitos de retroalimentación cerrado para conseguir los resultados que desea. Un bucle de realimentación cerrado es cuando la variable que está tratando de cambiar un sensor que te indica el valor actual. Ya puedes ver el valor actual es que fácilmente puede hacer ajustes para alcanzar el valor deseado. Por ejemplo, el velocímetro de un coche te dará el valor de lo que está tratando de control (velocidad). Cuando usted presiona el pedal del gas, crees que vas a 30km/h. Pero el velocímetro te dice que vas a 35 kilómetros por hora. Usted sabe que usted necesita facilitar el el pedal para conseguir la velocidad deseada.
Ahora PID es un método de alcanzar el valor deseado de la manera deseada. Hay un montón de cartas que muestran la diferencia en bucles de retroalimentación diferentes. Pero llegaremos a eso más adelante. Por ahora, necesitamos entender cómo cada parte (P, I y D) afectará a sus resultados. Este es un resumen muy básico de lo que hace cada parte del sistema de control. Es suficiente para hacerse una idea general de cómo funciona el PID, pero apenas es rayar la superficie. Ver aquí para más información.
La primera variable es la variable proporcional. Volviendo a nuestro ejemplo del coche, pretender que comience en 0km/h y para llegar a 30 kilómetros por hora. La parte proporcional del controlador diría el sistema para agregar 5km/h cada segundo. Esto significa que se tarda 6 segundos para alcanzar la velocidad de su objetivo. Ver la primera imagen de un gráfico explicar mejor.
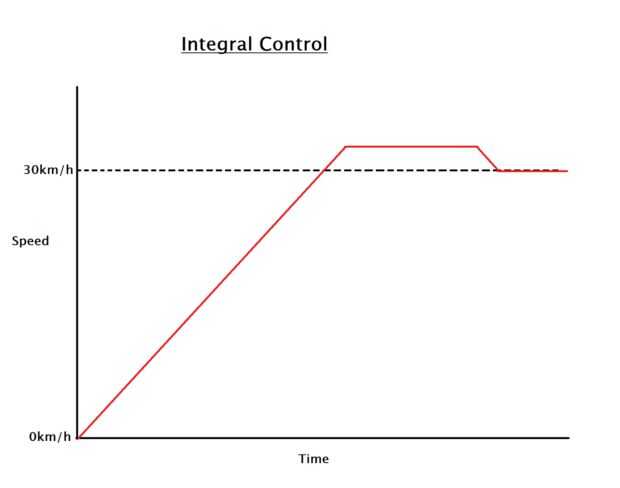
La segunda variable es la Integral. La parte integral del controlador de relojes para pequeños errores. Decir que en lugar de aumentar la velocidad de 5 km/h, aumentar por 7 kilómetros por hora. Después de 5 segundos, se llega a 35 kilómetros por hora. Esto está por encima de su valor deseado pero puesto que sólo puede moverse en pasos de 7km/h, usted no puede reducir la velocidad o de lo contrario se alcanzará el valor objetivo. Cuando la velocidad se mantiene a 35km/h, la parte integral del controlador nota que son 5km/h de tu objetivo. Después de estar mal por X periodo de tiempo, el controlador dice "hey, tenemos que ajustar la velocidad de 5km/h para alcanzar nuestro objetivo". De esta manera la integral parte del controlador puede controlar errores acumulados y suavizar la salida al valor deseado. Ver la segunda imagen para un gráfico explicar mejor.
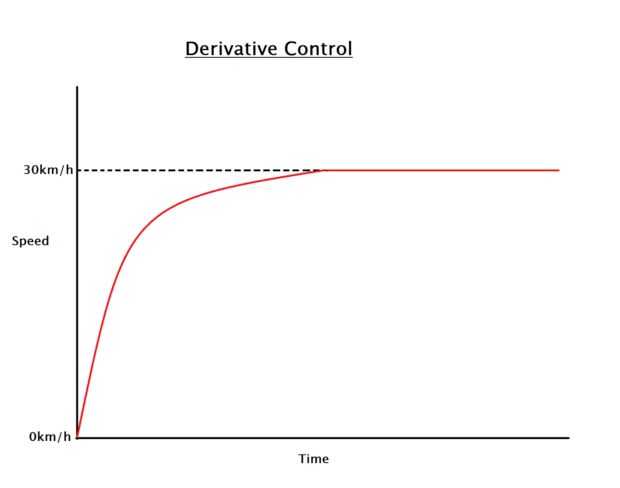
La tercera variable es la variable derivada. La parte derivativa del controlador le permite llegar a su destino más rápido. La variable derivada está ajustando constantemente cuánto afecta a la salida, dependiendo de cuán cerca estás al valor deseado. Una vez más, pretender que empezar en 0km/h. La variable derivada dice que "si estamos entre 0-10km/hr, velocidad se incrementará en 10 kilómetros por hora. Si somos entre 10-20km/h, la velocidad aumentará en 7 kilómetros por hora. Si somos entre 20-30 km/h, estamos cerca de la velocidad deseada, por lo que aumentará la velocidad en 5 km/h". Ver la tercera imagen de un gráfico explicar mejor.



")


")

")




