Paso 2: Configuración del Hardware
Es necesario que los sensores de efecto hall de alambre del mismo modo que hicimos en la parte 1. Sólo vamos a utilizar 1 señal de efecto hall por actuador.
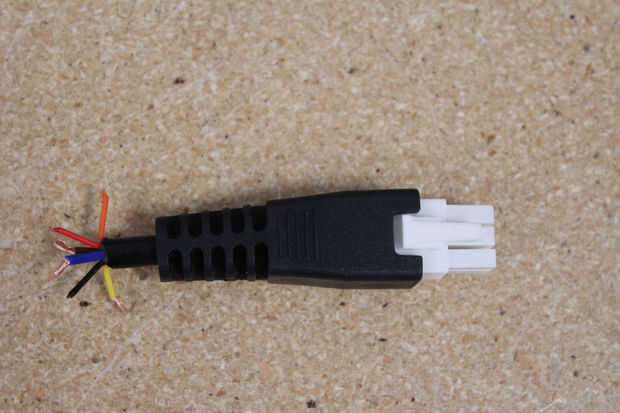
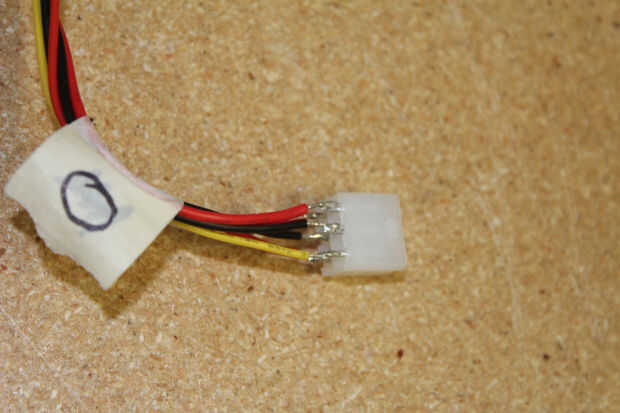
Los cables como sigue:
-Cable rojo a 5V
-Cable a tierra negro
-Cable amarillo al pin de interrupción de Arduino
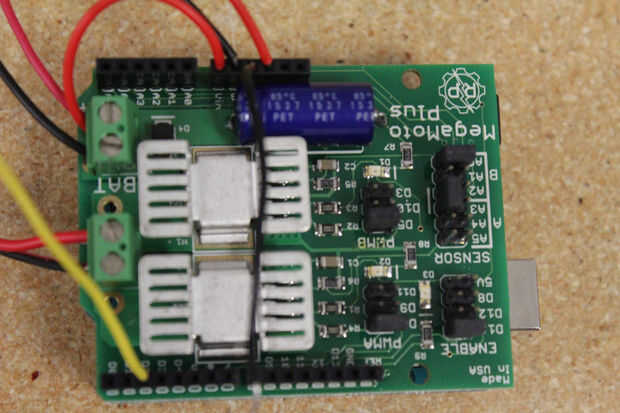
-Actuador rojo alambre a MOTA de la MegaMoto
-Actuador negro alambre de MOTB de la MegaMoto
Compruebe el inicio del código en el siguiente paso y garantizar que los puentes de la MegaMoto se establecen en los pines correctos y que los sensores de efecto hall se fijan a los pins correctos. Asegurar que "hall0" y "hall1" corresponden a la correcta MegaMotos (PWMA0 y PWMA1, respectivamente).
Una vez que los motores están conectados correctamente a los tableros, cable como sigue:
-Conectar 12V al BAT +
-Conectar el GND al BAT-
-Conectar 12V a Vin en la ONU
-Dos botones entre pines 4 y 7, conexión a tierra del alambre



")


")

")




