Paso 4: Creación del modelo en simulink
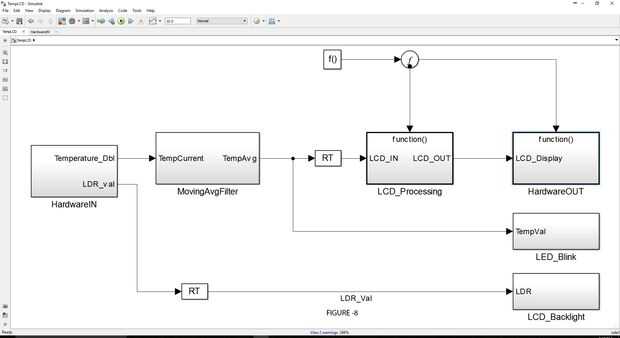
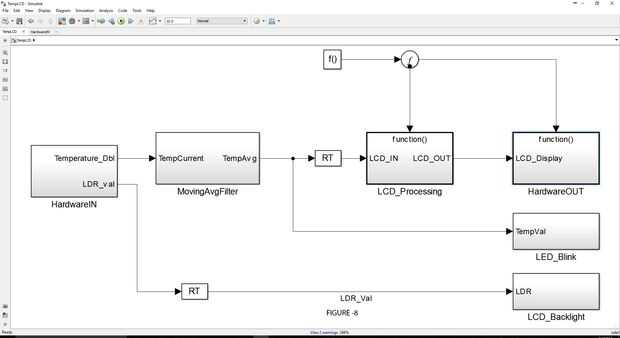
La figura 8 muestra el modelo completo de Simulink para el proyecto. Tiene 3 partes
- Entrada de hardware - donde se leerá los datos de los sensores
- Procesamiento de datos - es un filtro de media móvil.
- Salida hardware - datos se escribirá en la pantalla con este bloque.
Otros componentes importantes del modelo son
- Bloques de transición tasa (dados por RT) - se utilizan como señales de los diferentes tipos de.
- Bloque de generador de llamada de función (de f()) - se utiliza para escribir en la pantalla LCD sólo después de un período de tiempo especificado. Este tiempo debe ser un entero múltiplo del tiempo de ciclo de programa.
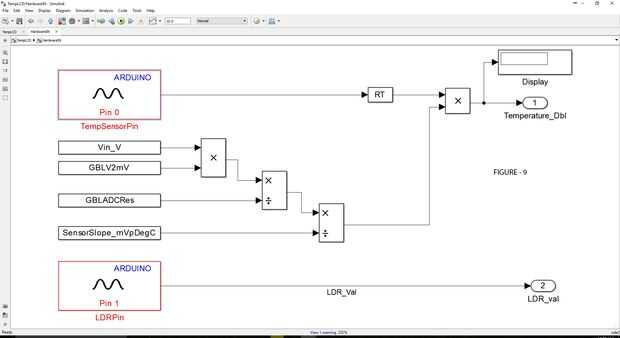
Ahora que el bloque de entrada de Hardware leeremos la clavija de entrada de sensor de temperatura (es el pin analógico donde está conectado el sensor de temperatura) y los datos de pin LDR. También tenemos que convertir los datos de temperatura en grados Celsius. Yo estoy usando el sensor de temperatura LM 35 y su tabla de calibración está fácilmente disponible en internet (buscalo en google lo). Tenemos que utilizar la siguiente fórmula para convertir,
Temp_DegC = SensorReading/((SensorIPVoltage_mV/ADCResolution)/SensorSlope)
SensorReading = este valor se obtendrá del sensor
SensorIPVoltage = 5000
ADCResolution = 1023
SensorSlope = 10
(Ver fig 9)
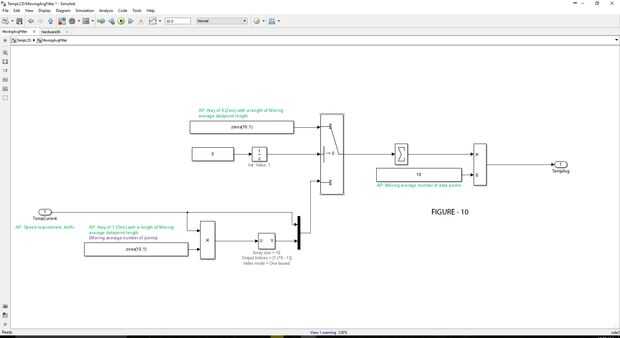
El siguiente es el filtro. Aquí he utilizado un punto 10 filtro promedio en movimiento. puede utilizar cualquier otro filtro también. (Ver fig 10)
Finalmente tenemos que hacer un trabajo para enviar los datos al LCD. Simulink no puede enviar datos de tipo string y char tenemos que utilizar algún método alternativo. Aquí envío el valor ASCII de lo que se imprimirá en la pantalla LCD. Para ello necesitamos crear una lista de variables formadas por de caracteres posibles a imprimir con sus valores ASCII. (Como A, a, B, b,..., Z, z, 0, 1, 2..., 9 y por supuesto el signo decimal (.) y espacio ()).
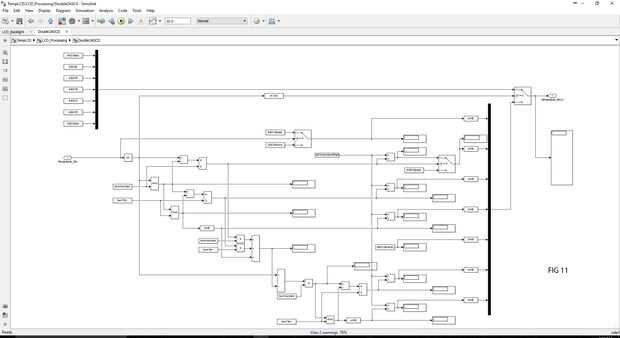
Los datos de temperatura están en datos de tipo doble y tenemos que convertir en una cadena. Si ves la figura 11 el procedimiento será transparente.
Autobús se utiliza para convertir los datos de 1 * 1 en una matriz.
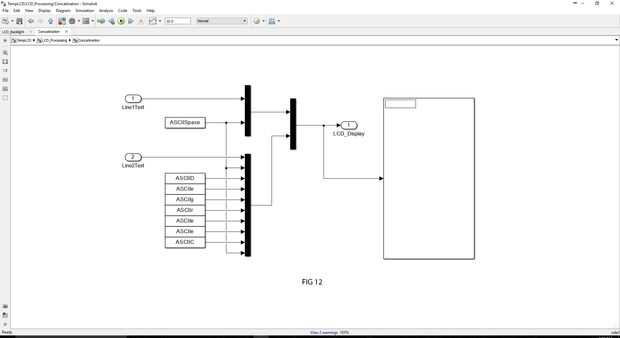
Por último conectaremos el autobús a la función S creada en el paso anterior. (Consulte la figura 12).
Ahora podemos ejecutar el modelo para ver el resultado en pantalla.













