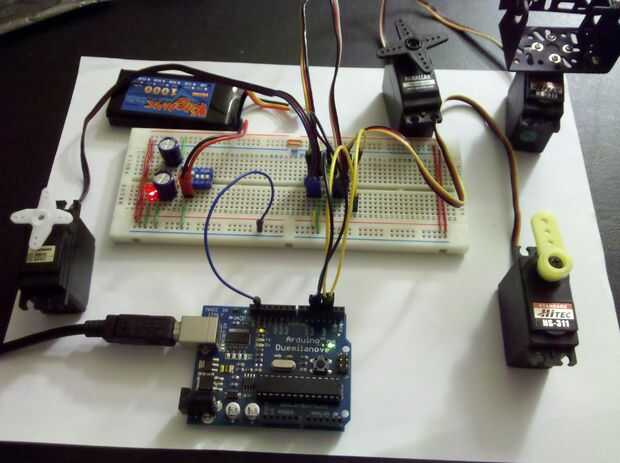
Hay dos partes principales a la aplicación. La primera parte que voy a comentar es el firmware y el hardware. Esto incluye el Arduino y otro tablero que vamos a utilizar para alimentar los servos. Es importante aislar la alimentación del servo de la potencia del microprocesador, en el caso de los servos necesitan más corriente que puede suministrar la batería (imaginar todos 12 servos estancamiento a la vez). Si las fuentes de alimentación son las mismas podría tener una condición de baja de voltaje en su microprocesador dependiendo de qué tipo de alimentación que está utilizando. También le mostraré el firmware necesario para ejecutar esta aplicación en el Arduino.
En la segunda parte discutiré algunos sencillo software que te permitirá controlar el firmware a través de comandos serie. Este software proporciona una interfaz para el firmware de Arduino para controlar los servos, excepto start servo posiciones, incluso grabar una serie de posiciones, o marcos, (de todos los canales guardados a la vez) para la reproducción en secuencia cuando se desee. El software es .net base así que asegúrese de que usted tiene el último instalado .net framework. Suministrará un instalador y código fuente.
Aquí está un vídeo de demostración del proyecto:

")









 y Flash HIDUINO con ISP a tu Arduino en un dispositivo HID (usb-midi)")

