Paso 6: Instalar y ejecutar el Software
Al final fui con sencillez y había creado a un instalador para el software de serie Servo Control. El software requiere .net Framework 3.5sp1 o mejor (la última versión del marco va a estar bien). También, proporcionaremos código fuente para su modificación.
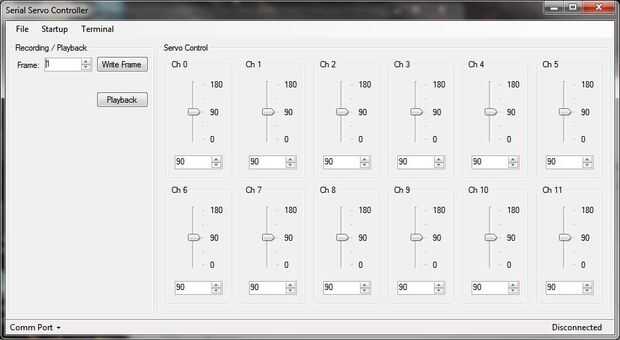
El programa es sencillo y la interfaz es crudo y anticuado pero funciona. Se puede controlar a uno de 12 canales (0-11) con un cursor de numérico arriba/abajo, o entrando directamente en el valor que desee. Los valores son en grados y representan la posición del servo para mover a. En esta versión el servo atraviesa en su mayor velocidad pero a agregar rampa en una versión posterior.
Aquí está el link para el instalador (Admin Rights requerido):
https://docs.Google.com/Open?ID=0B-GOV0jkq9cRMDY4YWE3ZjAtNGU1YS00MDRiLTg3NzAtZjA2YzQ0ZDMyZWYx
Aquí está el enlace al código fuente:
https://github.com/Soshimo/serial-servo-Controller
No voy a modificar o construir el código fuente por lo que por su propia cuenta para la ayuda. Una advertencia, requiere el SDK de instalador de Windows XML ser instalado en su máquina. Si usted no tiene que instalar solo puede quitar el proyecto de instalación de la solución. Se construye para Visual Studio 2008 pero se puede actualizar a 2010 sin ningún problema. El proyecto requiere .net framework version 3.5sp1.
Solución de problemas:
¿Ves el puerto COM de Arduino en la lista de puertos COM para conectar a?
Si no, asegúrese de que tiene instalados los controladores Arduino y que la junta esté encendida.
Cuando envía comandos al firmware ¿ves algún error en la ventana de terminal?
A veces los errores pueden ayudar a perno de señalar el problema.
¿Algunos de los servos se mueven pero no en otros?
Compruebe la polaridad de los cables de servo, asegúrese de que la conexión es segura - a veces puede trabajar flojo si no caliente encolar los terminales (o les sujetada de otra manera).
¿Usted puede reiniciar la terminal desde la Terminal-> Reset menú?
Asegúrese de que el cable USB está conectado al puerto USB de Arduino. El firmware utiliza el hardware UART.
Finalmente, si nada funciona y no hay retroalimentación se da desde la ventana de terminal, compruebe todas las conexiones eléctricas. Asegúrese de que los cables de los servos están conectados correctamente. Invertir en un DMM si ya tienes uno - usted puede encontrar los utilizables por debajo de $50. Compruebe los voltajes con potencia aplicada. Asegúrese de tener por lo menos va a 5V los servos o no se mueven correctamente. Compruebe las conexiones de tierra en el tablero. Asegúrese de que todas las tensiones son iguales en todos los puntos de tierra. Finalmente, quite la alimentación del circuito y verifique la continuidad. ¡ Importante! Asegúrese de que usted quite la alimentación antes de verificar la continuidad. Podría dañar su DMM, tablero, Arduino o usted mismo lo contrario.
No tomar ninguna respsonbility, niether expresa ni implícita para cualquier cosa que puede hacer al construir o utilizar este proyecto. Este proyecto es que MIT licencia [http://www.opensource.org/licenses/mit-license.php] por lo que eres libre de usarlo y modificarlo a voluntad. Solo pido que mantengan todos los atributos. ¡Que te diviertas!

")









 y Flash HIDUINO con ISP a tu Arduino en un dispositivo HID (usb-midi)")

