Paso 1: Concepto general
Al principio cuando haces algo como esto, hay infinitas opciones y direcciones que se puede ir. ¿Cómo queremos conducir las órbitas de los planetas en esta pieza? ¿Un motor para cada planeta, o un motor para todos? ¿Velocidades controladas con engranaje, controladores de motor o ambos? Otras formas (motores hidráulicos)?? ¿Motores AC o Dc? ¿Cadenas, engranajes, correas, ruedas de fricción?
Sabíamos que queríamos que la velocidad de las órbitas al ser proporcionales entre sí. Año de mercurio es sólo 88 días terrestres largos, mientras que Neptuno es 60190 días tierra! Así que hay una amplia gama de velocidades que estábamos tratando con (lo siento chicos, no Plutón aquí!). Además, el brazo de Neptuno es de 20 pies de largo y con el planeta en el extremo, el esfuerzo de torsión incluso un viento muy suave sería significativo. También hemos querido control informático de las velocidades del planeta, por lo que podríamos marcar en alineamiento planetario de fechas como los cumpleaños de las personas.
Estábamos en un presupuesto muy pequeño para una pieza tan compleja. El primer pensamiento fue separados motores DC para cada planeta. En el pasado, he usado DC 1/6-1/4hp cepillado motorreductores para obras de arte. Los motores ellos mismos son bastante agradable bien sellado, fiables, fáciles de montar, reduce hasta una velocidad agradable ya. Corren sobre ea $500, que está bastante caro ya para 8 planetas (o incluso los 4 grandes planetas). Pero los controladores (que cuestan otros $100 más o menos) son terribles. Soplan por si aún piensas en mirarlos mal. Tiran mucho ruido eléctrico que congela micros (incluso Arduinos, que son tipos muy duros poco!) que están en cualquier parte dentro de unos pocos pies. Después de 6 de los de otro proyecto de Playa (Helyx), prometí nunca usarlos otra vez.
Para motores de corriente continua, el precio sólo subió de allí si queríamos controladores no horrible. Motores de corriente alterna de un velocidad-controlable sabor no son nada mejores. Por lo que parece separado, motores de velocidad controlable de cada planeta no eran realmente prácticos para nuestro presupuesto.
Empecé a pensar en formas para conducir a los planetas de uno, grande, motor de CA corriente a velocidad constante. Grandes motores de corriente alterna son bastante baratos de distribuidores de excedentes, que terminamos usando costo alrededor de $200. Un pensamiento era utilizar motores hidráulicos de funcionamiento apagado de una bomba impulsada por el principal motor, allí son algunos componentes hidráulicos baratos en las tiendas de excedentes también. Pero hidráulica sería desordenado, difícil de controlar precisamente sin costosas válvulas proporcionales, y no pude encontrar componentes que emparejar para arriba de una manera (teniendo en cuenta velocidad, torque, presión hidráulica y flujo hidráulico) que parecía funcionar.
También, la visión de la pieza era algo muy mecánico, táctil, crystalley oscuro e intrincado. Así dibujó me hacia una cosa mecánica, conducción de todos los planetas. Además, estaba en Europa para el verano diseñando el sistema de alimentación de la pieza mientras que el resto del equipo fue la construcción de la obra en San Francisco. Por lo tanto, una cosa que era una unidad que podría fácilmente enchúfalo en el resto de la escultura a lo parecía muy atractiva. Comencé a pensar acerca de mecánica y mecanismos de escape y diferentes formas de control de velocidad con ellos. Aunque de diferentes maneras en que podríamos controlar velocidad accionando un solenoide para conectar o desconectar el suministro a un paso de un planeta a la vez, de la misma manera que un antiguo reloj mecánico se mueve en una serie de pasos discretos.
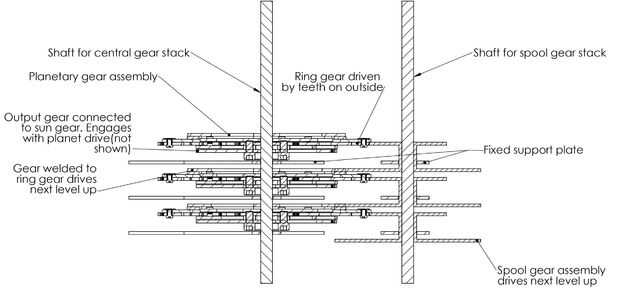
Controlar la velocidad soltando el disco fuerza y dejando cosas ralentizar un poco a la vez parecía la forma más práctica de adelante-el par sería importante y el motor funcionaría a una velocidad constante, por lo que parece más fácil dejar que la hoja par un poco a la vez que tener algún mecanismo para agregar par un poco a la vez. Terminé yendo con un gearset planetario, donde tendría lugar la jaula que encierra los engranajes de planeta fija por un freno accionado por solenoide, el engranaje de anillo sería conducido por el motor y el engranaje del sol haría el planeta. Habría 8 de estos en una cadena, la velocidad de cada paso en la cadena ser de la anterior por las velocidades de transmisión. De esta manera, podríamos obtener la amplia gama de velocidades que necesitamos sin el salto de velocidades demasiado grande en cualquier un momento.
La velocidad de cada planeta sería controlada por el freno en la jaula de cada engranaje planetario. Para que el planeta a toda velocidad, el freno se aplicaría plenamente, que transmitiría toda la energía del planeta. Para ralentizar el planeta, quisiera liberar el freno, y fricción desaceleraría la órbita. Una ilustración útil del principio es en el primer video. Habría un microcontrolador constantemente aplicar y soltar el freno para alcanzar la velocidad deseada-it es una especie de modulación de anchura de pulso muy lento, mecánico. El micro también sentido si viento fue acelerar el planeta fue soltando el freno en vez de frenarlo compensar y usar eso para hacer un seguimiento de la dirección del viento predominante. Esa era la idea al menos.
Todo esto sería construida con engranajes que nosotros mismos cortamos en 1/4" acero en un cortador del plasma CNC. (Hemos hecho algunos test engranajes antes de instalarse en esta ruta, y eran prometedores).













