Paso 3: construcción


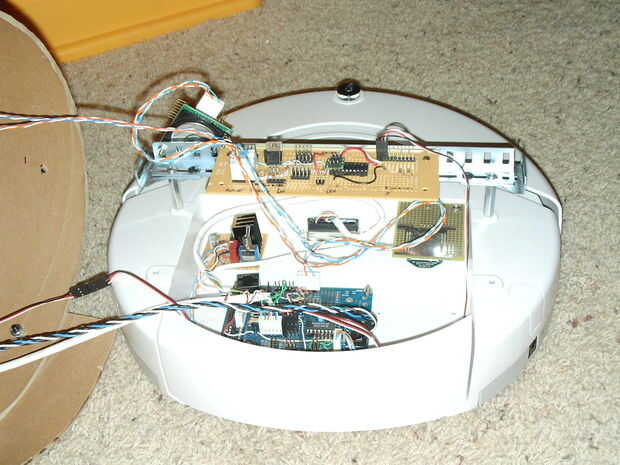





El tubo se enrosca en la base con dos tornillos en la parte que van unas ranuras en los soportes montados sobre el crear con las piezas de mi kit de robótica VEX. La parte posterior del tubo tiene un labio extra que sumerge el extremo posterior de la carga de la bahía, que ayuda a prevenir movimientos balanceo adelante-atrás. Los dos tornillos que son simples pero lo suficientemente fuerte como para poder recoger el bot por el tubo y colocarlo donde quieras.
Las conexiones físicas de la hélice para la crear de sí mismo consiste en la serie TX y RX pernos, el pin de 5v regulada en el crear se conecta para detectar cuando se enciende el crear, el Power Toggle pin también está conectado. También la base de detectar pin está conectado para saber cuando nos estamos conectados.
Se perforaron los agujeros para el Sonar y arandelas de goma fueron insertados para sostener los sonares. Adicional de cinco agujeros fueron perforados en la parte posterior para los botones y un LED.
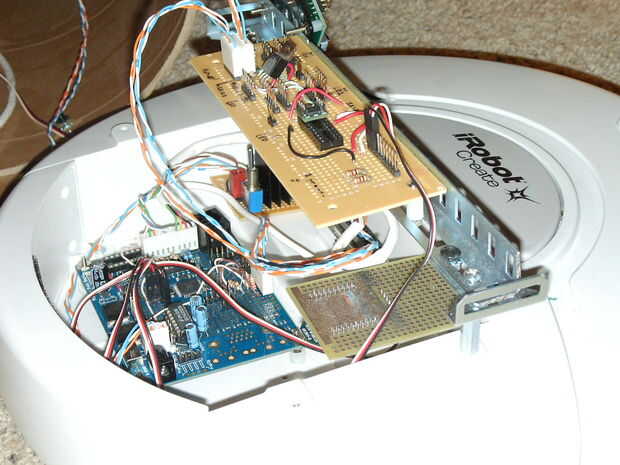
Una tabla se agregó para el bus i2c y el módulo de brújula. Los sonares y texto a voz módulo están conectados al bus i2c. El módulo de brújula es connectected a la hélice mediante un puente de alambre.
Un regulador de voltaje Variable se utilizó para caer el voltaje de VPwr crea hasta 9v antes de alimentar la ProtoBoard de la hélice, que tiene un regulador de 5.0v y 3.3v. Un fijo de 9 voltios regulador estaría muy bien, yo solo no podrían encontrar uno a la vez. Debe soltar el 18v desde el Vpwr crear abajo a 9 voltios antes de ir a la Junta de Proto porque el regulador de 3.3v y 5v no puede manejar 18v de entrada directamente. Además, la Junta de Proto no tiene espacio para disipadores de calor así que a soltar la tensión tanto como sea posible antes de llegar a ellos.
Otro Consejo fue agregado para la interfaz de XBee Radio. El XBee tiene 2mm perno espaciamiento por lo que no encaja en el estándar de. 001" breadboards sin hacer un tablero personalizado.
El regulador de 9v, interfaz XBee y tal vez el HM55B Compass se montará directamente en el ProtoBoard de la siguiente generación.


")

")


")





