Paso 6: Conectar el Sonar(s)

Necesitaba ojos! Pero me conformé con algunos buena ol ' orejas de murciélago. Sonar. Ultrasonidos. (aunque se puede escucharlo que hace un tick-tick-tick sonido si escuchas real cerca)
El Sonar envía una onda de sonido y espera recuperarse, entonces calcula cuánto tiempo tomó para que el sonido volver a determinar la distancia (basada en la velocidad que viaja de sonido al nivel del mar). Los que uso son precisos de unas seis pulgadas a 40 pulgadas.
Puedo detectar la distancia de un objeto y decir el robot para frenar o parar dependiendo de la distancia del objeto.
Sonares trabajados mejor que sensores infrarrojo gama (en este caso) debido a la mayor cono de detección. Sensores infrarrojo gama tienen un haz muy estrecho y no recoger objeto ligeramente fuera del centro como los sonares.
Ya que no quiero veer demasiado fuera del hipódromo, simplemente tengo el robot de ralentizar y detener hasta que el objeto se mueve fuera del alcance. Ya que estoy utilizando el módulo de texto a voz, tengo el robot de decir "perdón" Si tiene que parar, así que usted sabe que está bloqueando y puede pasar.
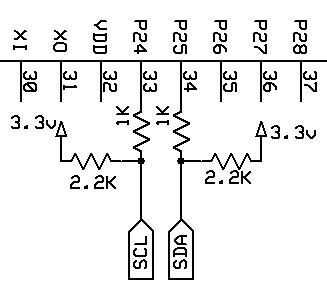
Los sonares se conectan a la hélice mediante un bus i2c. I2C es sólo otra forma elegante de hablar con un montón de dispositivos conectados a los mismos dos cables, pero cada dispositivo tiene es propia dirección así que usted puede hablar con ellos individualmente.
Tengo dos sonares en mi ServerBot, pero uno podría ser suficiente. Los sonares están conectados la misma forma a los alambres del mismo (en paralelo).
Construir circuito i2c con las resistencias de la serie de 1K y resistencias de pull-up de 2,2 k en el tablero de Proto (ver imagen).
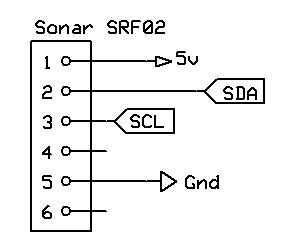
Conectarse los sonares (en paralelo) el + 5, puntos de conexión de Gnd, SCL y SDA en el Proto Board (ver imagen).


")

")


")





