Paso 3: Conseguir FIRMWARE
Esto es paso muy importante.
Este Firmware es necesario para sus comunicaciones de servo con LABVIEW. Si no subes este Firmware tus servos no responde en tiempo real.
Esta es la BASE de la LIFA.
a continuación se presentan los siguientes pasos para cargar el firmware en el IDE de Arduino.
PASO 1. Carga del FIRMWARE de LIFA para SERVO en ARDUINO
1.
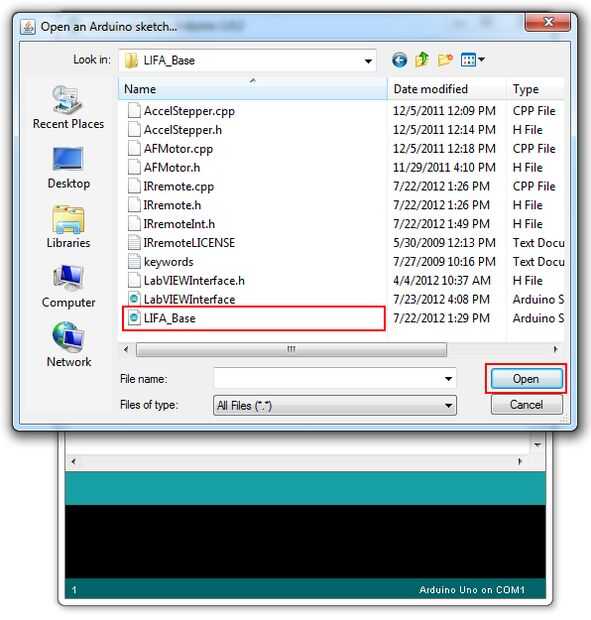
Haga clic en archivo» abrir
2.
Vaya a \vi.lib\LabVIEW interfaz para Arduino\Firmware\LIFA_Base donde es el directorio LabVIEW (c:\Program Files\National Instruments\LabVIEW 20XX por defecto). 3. Seleccione LIFA_Base.
Haga clic en abrir. La fuente del Firmware de LIFA es ahora visible en el IDE de Arduino.
4.
Haga clic en herramientas» la Junta» donde es el tipo de hardware de Arduino para desplegar.
LIFA fue diseñado con y probado utilizando un Arduino Uno, sin embargo la mayoría debería funcionar Arduino hardware compatible.
5.
Haga clic en herramientas» puerto serie» donde COMX es el puerto COM asociado con el Arduino (COM3 en el ejemplo anterior).
La sección de puertos de Windows Administrador de dispositivos puede utilizarse para determinar qué puerto COM está asociado con un Arduino.
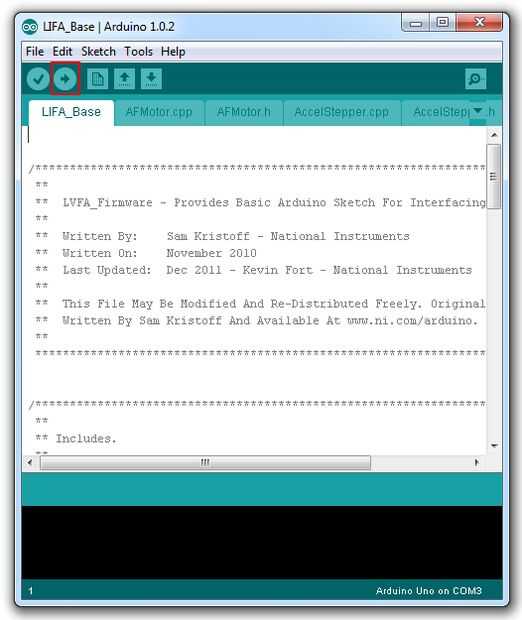
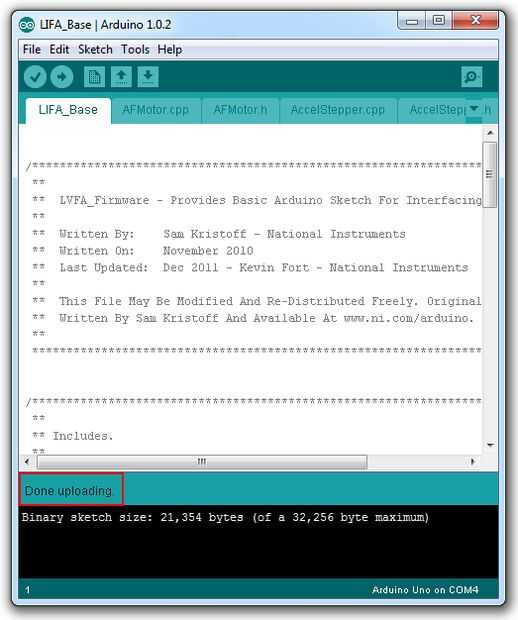
6. Haga clic en el botón subir.
En primer lugar el IDE de Arduino construye el firmware desde el código fuente. A continuación el IDE de Arduino despliega firmware en el Arduino.
También un Firmware especial se agrega aquí para no de servos que desea utilizar. Cambiar sus conexiones de servo en arduino según su necesidad.
Adjunto es un programa de muestra que tienes que subir en Arduino













