Paso 4: Configuración del HARDWARE
Aquí he utilizado 2 servomotores y Arduino UNO
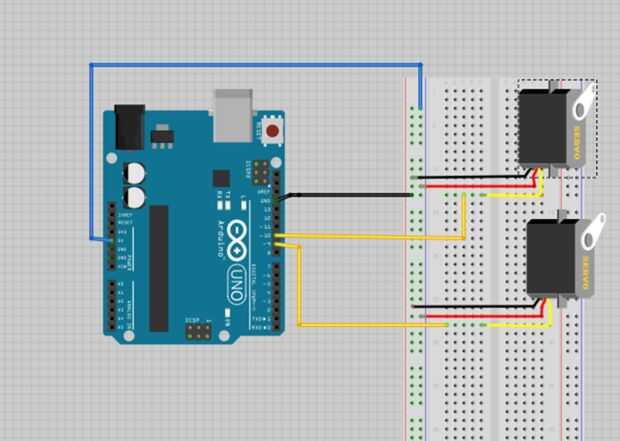
ESQUEMA DE LOS TERMINALES:
servo1.: cable rojo - + 5v
ALAMBRE NEGRO - TIERRA
AMARILLO - 10
servo 2.:
CABLE rojo - + 5v cable - GND negro
AMARILLO - 9
También adjunto un archivo fritzing













