



Utilicé un microserver 9g de Towerpro, pero la mayoría de estos servos es similar, por lo que la mayoría debería funcionar.
Esto me llevó bajo 5 minutos, y si estás haciendo más de uno debe ser incluso más rápida.
Herramientas:
Destornillador
Pegamento (pegamento caliente es probablemente mejor que el pegamento)
Cuchillo
1,5 mm taladro
Instrucciones:
1. Conecte el servo y ejecute el siguiente script de arduino para el servo del centro:
#include
Servo myservo; objeto de servo
void setup() {myservo.attach(2);} / / conecta el servo al pin 9 al objeto servo
void loop() {myservo.write(90);} / / sistemas servo al punto medio
Deja el servo conectado y funcionando
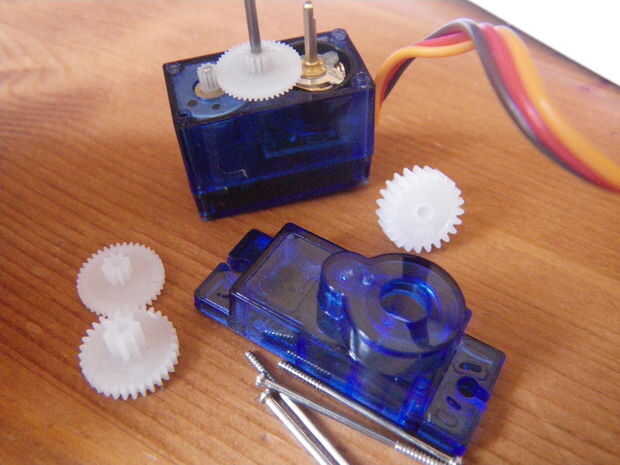
2. Quite los tornillos y quite la cubierta superior.
3. retirar los engranajes y gire el potenciómetro hasta encontrar el ángulo estable con ninguna actividad motora o tarareando (debe ser muy estrecha ya).
4. pegue el potenciómetro para que no gire. Pegamento de lo limpiaparabrisas para dejar el pegamento interfiriendo con la conexión eléctrica.
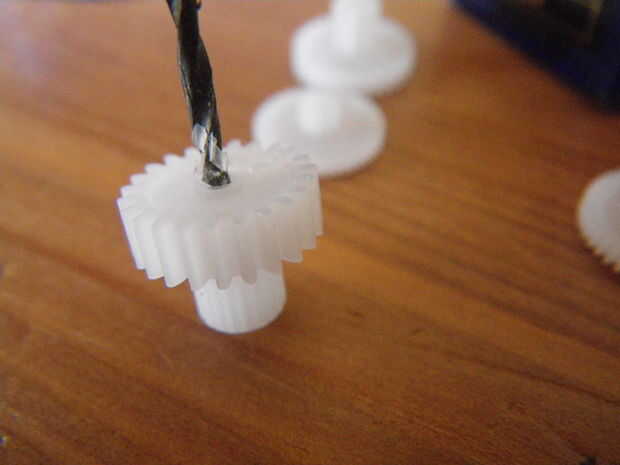
5. ahora corte el tope de rotación de la marcha.
6. Perfore el índice plano del agujero del cojinete de engranaje superior con una broca de 1,5 mm (el eje del potenciómetro es de 1.3 mm, pero el espacio extra no causa problemas). Ahora esto debe girar libremente (anteriormente el engranaje gira el potenciómetro).
7. Vuelva a montar y listo.





")

")

")



