Paso 1: Lo que usted necesita
La elección de las gamas de actuadores de motores de la C.C. junto con encoders (como en nuestro caso) para los motores servos RC simple. Rotación total pudo ser necesaria para la generación de paso avanzado, pero simple rotación limitada se logra con motores servos RC simple.
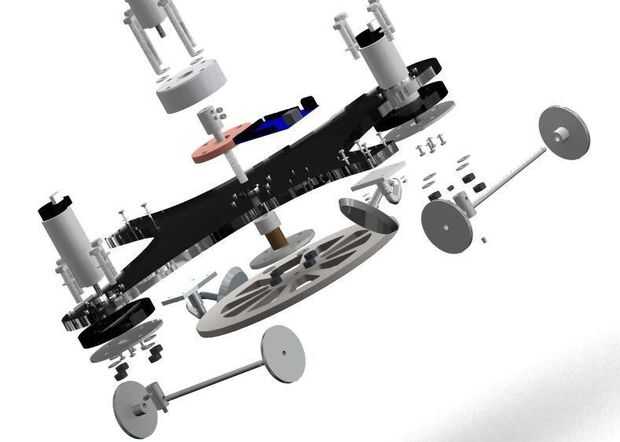
La mayoría de las piezas es por encargo. La lista de materias primas va como sigue:
Chasis: 50X60cm 12mm plexiglás
Volante: 8mm espesor acero disco, 27 cm de diámetro.
varilla de acero de 8cm de diámetro, 15cm de longitud
varilla de acero de 2cm de diámetro, 15cm de longitud
Además, compramos muchas partes no personalizadas:
Varilla de perforación de X 1 (de 12 pulgadas de largo) de Mcmaster (parte # 4345T41)
4XFriction ruedas de Mcmaster (parte # 2471 K 26)
2 ruedas de X Creeper (Mcmaster parte # 2475T6) (cualquier rueda rueda funciona)
Arduino Mega (Uno si se utilizan servos)
2 X motores (24V Gbox planetario 100: 1)
2 x Codificadores ópticos AMT103
2 x 10mmX26mm rodamientos (SKF parte #6000-2RSH)
(24 x) arandelas de 8mm
(28 x) arandelas de 3mm
(8 x) perno de 3 * 25mm
(4 x) perno de 8 * 70mm
(8 x) perno de 8 * 40mm
(12 x) perno de 3 * 10mm
(12 x) tuerca 3mm
(12 x) tuerca de 8mm
(4 X) 5 * 5 m m tornillo Allen
(2 X) 6 * 6mm tornillo Allen
Energía:
11.1V 2200mAh baterías de Lipo pero cualquier batería de Ni-Cd regular (pesado) hará el trabajo.
Comunicación:
Comunicación inalámbrica (bluetooth) fue utilizado para teleoperating el robot. Adaptador Bluetooth bajo costo ARF32 o MikroElektronika Bluetooth extraíble puede hacer el trabajo.













