Paso 2: Añadiendo un codificador de eje magnético MA3 al eje Z

Cuando John estaba haciendo su experimentando con este Shapeoko, usaba un DAC electrónica para controlar la modulación de los pines Z eje paso y dirección en el Arduino. Prefieren una opción más mecánico o eléctrico y esto utilizado con éxito a lo largo de todas las versiones desde el comienzo de nuestra "prueba de concepto". El codificador de eje MA3 tiene resolución de 10 bit (1024) para el 0-5 varía el voltaje de la salida.
El MA3 salidas varió de un 0-5v voltaje basado en el grado de rotación, para poder variar este voltaje de la salida de profundidades de eje Z en el código, que necesitábamos para conducir el MA3 con una correa de distribución para el motor de pasos del eje Z. Esto nos da una manera de mover el eje Z y el diodo láser hacia arriba y hacia abajo para ajustar la altura material mantener la distancia focal adecuada.
Encontramos que desde que el motor paso a paso en el Shapeoko es directo al tornillo del eje de Z, una proporción de 1-4 trabajado mejor. Encontramos un 40 dientes polea de correa dentada MXL en eBay con requiere de 5 mm (. 1968") alesaje caber el motor de pasos nema 17.
El motor paso a paso se pega hasta ahora en nuestra opinión, así que bajamos por 13mm (. 5118") reemplazando los tres separadores de 50mm (1,9685") con separadores de 37mm (1,4566") en lugar de otro. El acoplamiento flex no fue modificado de alguna manera de bajar el motor paso a paso. Sólo tomó algún reajuste en el paso a paso y Z eje Tornillo eje. El número de parte de McMaster Carr de estos separadores es 92080A445.
El número de parte de MA3-A10-125-B que tiene a. 125"(3.17 mm) diámetro de eje y McMaster Carr número 1375 K 11 polea de correa dentada MXL tiene 10 dientes que se ajuste el eje del codificador. También es para ser utilizado con a. 125"(3.17 mm) ancho correa que es un montón lo suficientemente fuerte como para este uso. El McMaster Carr. 125"(3.17 mm) ancho correa Kevlar reforzada y el número de pieza 1679 87 K que es un 100MXL de tamaño comercial.
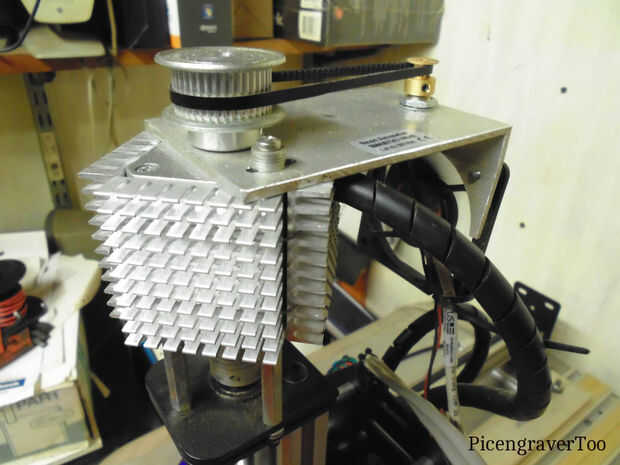
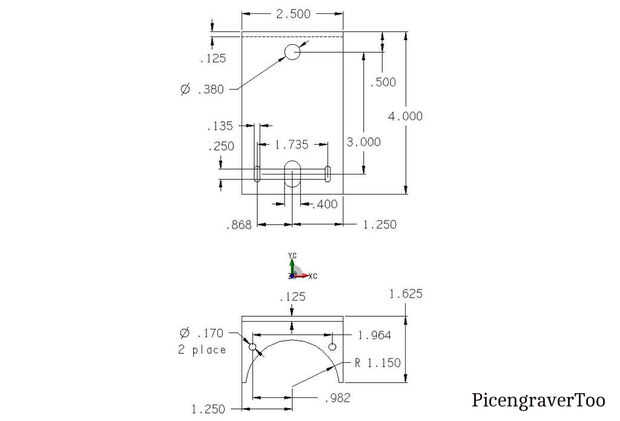
Un soporte de aluminio tuvieron que ser hechas para montar el encoder y el paso a paso de enfriamiento del ventilador. Sólo utilizamos un trozo de. 125"(3.17 mm) espesor aluminio ángulo 2.500" (63.5 mm) de ancho y cortar un lado 1,625"(41.27 mm) de largo y el otro lado 4,00" (101,6 mm) de largo. Puesto que el MA3 es un codificador de tipo magnético, teníamos que mantener una distancia de centro a centro de eje de 3,00"(76,2 mm) para evitar cualquier interferencia magnética del motor paso a paso. Si se usó un motor paso a paso 23 nema, esta distancia de centro a centro tendría que aumentarse.
El ventilador monta para enfriar el paso a paso también es menor para evitar esta interferencia magnética también, pero hemos doblado el aluminio un poco donde el ventilador se monta para apuntar el aire que sopla en el motor paso a paso. Ya que estamos empujando este motor de pasos bastante duros con mayor amps, aceleraciones más altas y teniendo en cuenta que está cambiando direcciones rápidamente, tenemos que añadir disipadores de calor para los cuatro lados. Encontramos algunos disipadores de calor en Amazon que se ajustan perfectamente a la nema 17 pasos. Con alguna pasta térmica aplicada a los motores paso a paso y algunos cables de seguridad inoxidable, pudimos apretar todos ellos alrededor de los cuatro lados. Se necesitaba un recorte en un disipador de calor para limpiar los cables del motor paso a paso.






, App MangoCube y Arduino UNO")


 firmware de com Grbl, LCD 16 x 2, teclado 3 x 4, tarjeta SD e 3 Arduino UNO")



