Paso 9: Arduino Shield
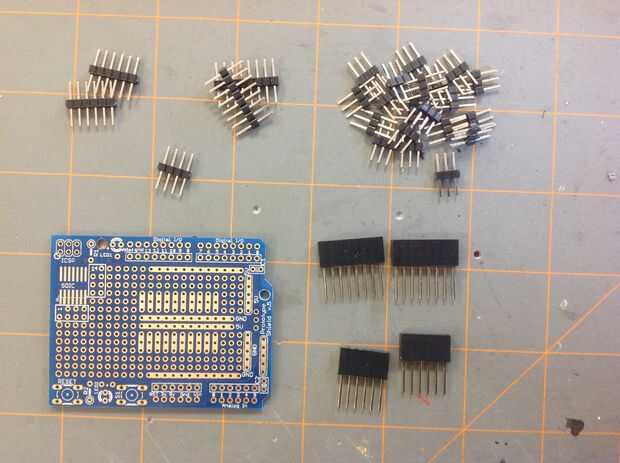

Componentes:
1 x placa de Arduino protoshield PC
20 x tres conectores
1 x cuatro conectores
2 x conectores de seis pines
2 x conectores de pin ocho
2 x zócalos pin dos
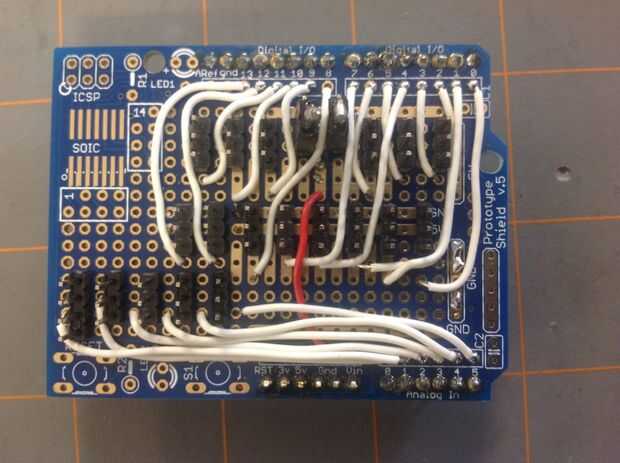
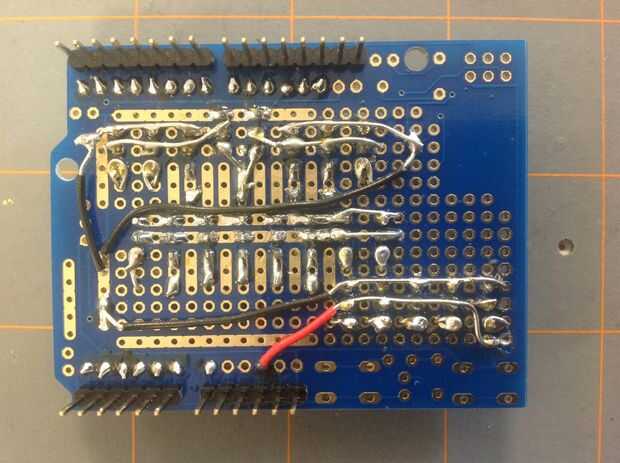
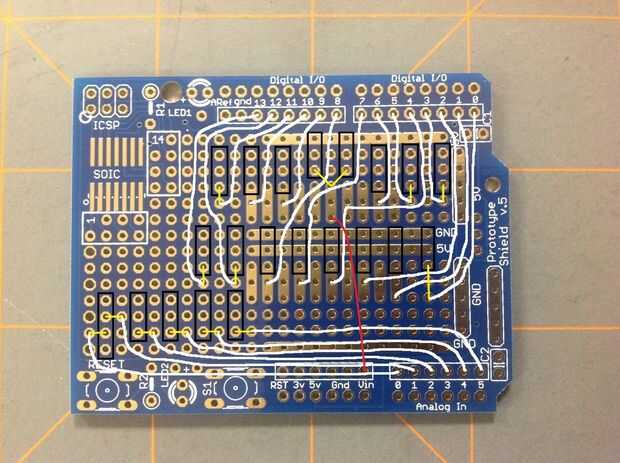
Construir el escudo Arduino fue la parte más difícil del proyecto. El producto final puede verse en la parte delantera y la espalda en las figuras 9-2 y 9-3. Para obtener una idea más clara sobre el cableado, se refieren a las figuras 9-5, 9-6 y 9-7. En estas cifras, los rectángulos negros indican las posiciones de 20 tres pin conectores y 1 conector de cuatro patillas. (Recuerde, el sensor ultrasónico de paso 5 requiere una conexión de cuatro pines). Lo primero que hice fue soldar los conectores a la placa Arduino desnudo. No utilice cuchillas al ras para cortar los cables del conector en la parte posterior de la Junta Directiva como los cables son demasiado gruesos y probablemente se daño las cuchillas al ras. Yo utiliza tijeras de trabajo pesado para cortar esos plomos.
Las primeras conexiones de cable que hice fueron las representadas en la figura 9-5. Las líneas blancas son los cables de conexión de los pines de Arduino para el pin de señal del conector de tres clavijas adecuadas. Estas conexiones aparecen como blanco los cables en la figura 9-2. Las líneas amarillas en la figura 9-5 son la continuidad de los cables blancos debajo de la pantalla con el conector designado. Se tira desnudo una pulgada extra de alambre, lo asoman por el agujero indicado en la figura 9-5, y luego en la parte inferior del escudo sería doblar el alambre desnudo alrededor del perno de la señal y de la soldadura. Se trata de la conexión amarilla en la figura 9-5. La línea roja en la figura 9-5 toma el voltaje de la batería de entrada (Vin) y conecta con los dos pernos que indique las conexiones amarillo. (Otra vez, esas conexiones son en la parte inferior del escudo).
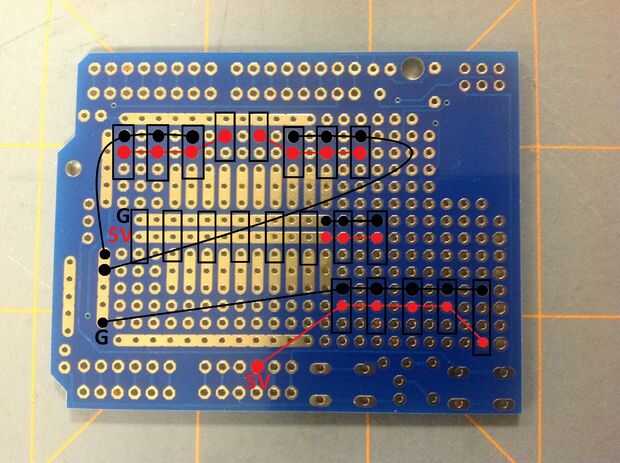
Figura 9-6 muestra las conexiones en la parte inferior del escudo. Aquí es necesario una nota de explicación. Los pines PWM digitales de Arduino (D3, D5, D6, D9, D10 y D11) se utilizan servos de accionamiento, incluyendo servos de rotación continua, utilizados como ruedas en un robot. Así, a veces dibujan mucha corriente. Por lo tanto, sería bueno si podría ser conducidos de entrada pilas directamente y no regulada 5V de Arduino. En la parte superior de la figura 9-6, extienden más alto que los otros dos rectángulos negros. Las clavijas superiores de los rectángulos se encuentran en el riel de 5V de Arduino. Los pernos de la parte inferior de los rectángulos están conectados a la tensión de la batería de entrada por la línea roja en la figura 9-5. El pin central de uno de esos rectángulos se conecta a los pines de voltaje de la D3, D5 y D6. El pin central del otro rectángulo se conecta a los pines de voltaje de D9, D10 y D11. Así, en la parte superior de la placa Arduino, un puente puede utilizarse para conectar los pines PWM para el riel de 5V si están conectados a los sensores de corriente baja, o a la tensión de entrada de la batería si están conectados los pines PWM para servos de rueda actual alta. (Más sobre esto más adelante).
A las conexiones en la figura 9-6. Las líneas negras conectan las clavijas de tierra para el carril de tierra de Arduino. La línea roja en la parte inferior de la figura 9-6 conecta a los pines de voltaje de los conectores analógicos a 5V. La línea roja en el medio de la figura 9-6 conecta a los pines de voltaje de los conectores digital PWM no en el riel de 5V. Las líneas superiores rojo en la figura 9-6 conectan los pines de voltaje de los conectores digitales PWM a uno de los conectores de dos puente controlado en el último párrafo. Las clavijas están bastante cercanas, que significó que tuve que usar un montón de alambre desnudo como se aprecia en la figura 9-3. Por suerte no terminó para arriba con cualquier cortos. Finalmente, el pin de seis y ocho conectores se inserta a través de la parte inferior del escudo y soldados en prever los conectores de la pantalla a un Arduino.
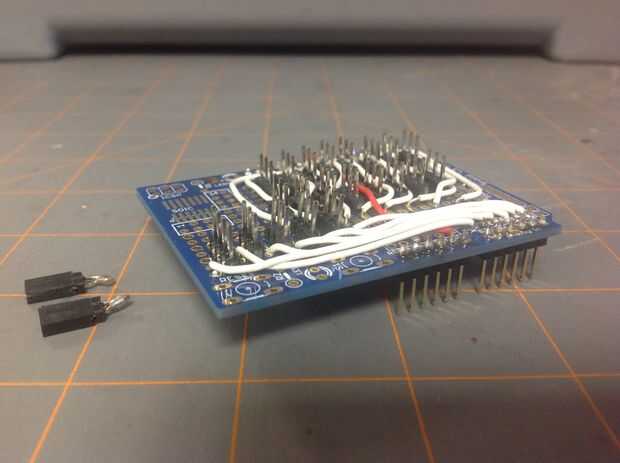
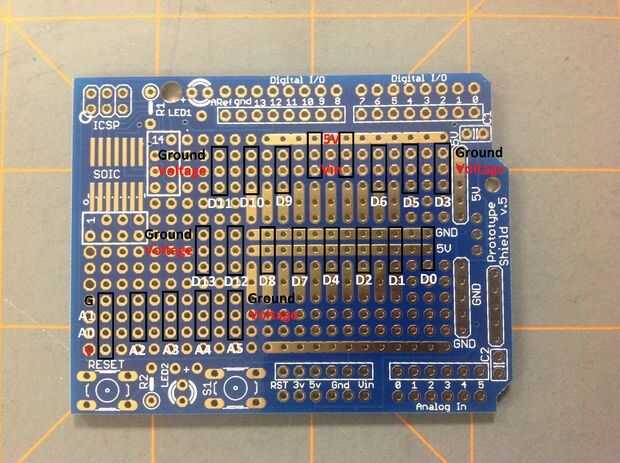
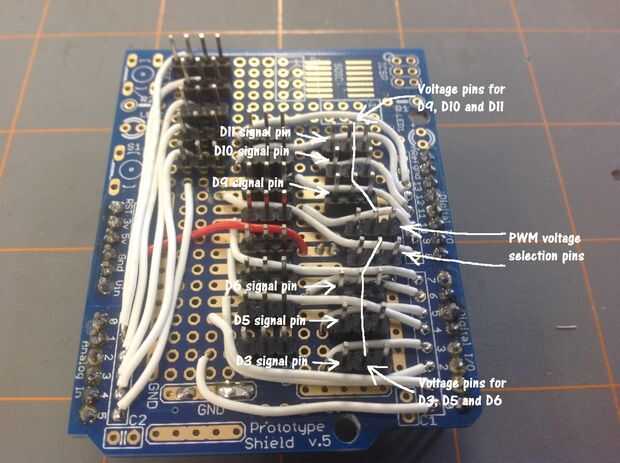
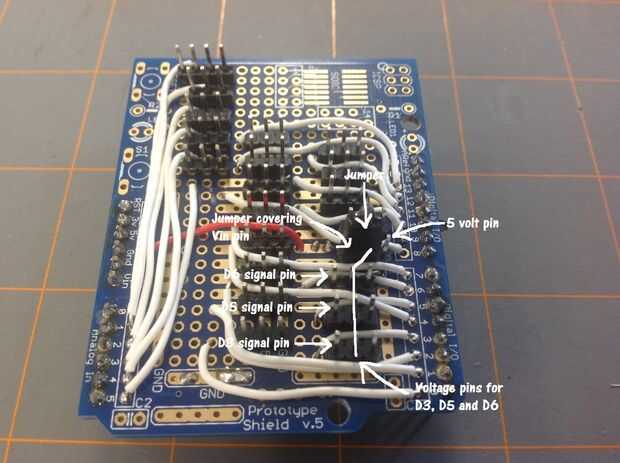
Para hacer los puentes para los pines PWM me llevó un par de dos zócalos de patillas y soldar los pines juntos. Éstos pueden abeja vista a la izquierda en la figura 9-4. Figura 9-7 muestra las etiquetas para el escudo. Los sensores pueden conectarse ahora por los cables de tres clavijas a cualquiera de los rectángulos negros etiquetados D0-D13 o A2-A5. Un cable de cuatro pines sirve para conectar las clavijas analógicas A0 y A1 a un sensor de ultrasonidos HC-SR04. Los puentes PWM se insertan en los dos rectángulos negros que se extienden más arriba de todos los demás en la figura 9-7. El rectángulo negro de la derecha controla pines D3, D5 y D6. El rectángulo negro de la izquierda controla pernos D9, D10 y D11. Si desea que los pines PWM conectados a 5V de Arduino, coloque el puente para conectar el perno superior de los rectángulos negros con el pin central. Si desea que los pines PWM conectados a la tensión de entrada de la batería, coloque el puente para conectar la clavija inferior de los rectángulos negros en el pasador central. Figura 9-8 muestra los pines PWM y voltaje pins de selección más detalladamente. Figura 9-9 muestra el puente para los pernos de tensión de D3, D5 y D6 con el voltaje de las baterías de entrada de la fuente. Figura 9-10 se muestra el puente para los mismos pernos con 5 voltios de la fuente.













