Paso 3: programación...
Algo más sobre nuestras entradas analógicas. Medimos las cuatro de la LDR.
En el programa asignar los valores, ya que no es necesario usar el valor entero: desde nuestros servos comienzan en 90°, sólo necesitamos 90° en cada dirección para hacerlos funcionar.
Esto se hace así: mapa = (a, 0, 1023, 0, 90);
Esto da una lectura más estable y más fácil de enviar los valores a los servos. con esto, podemos utilizar directamente como un valor de salida.
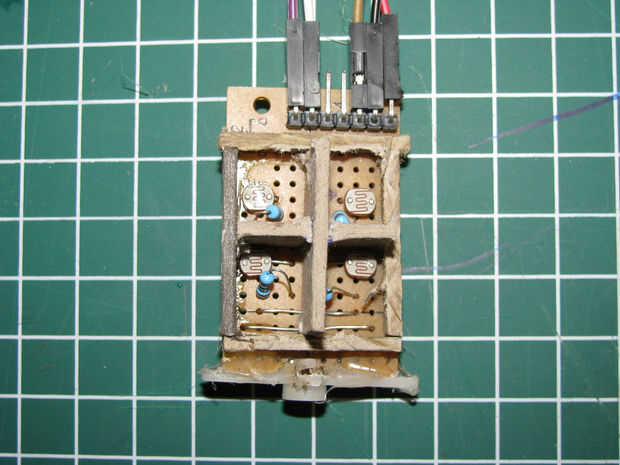
En el tablero experimental, como se muestra en la imagen, verá el cartón "células". Estos cuidar de él que el ldr puede leer las diferencias de la luz. Utilizar solamente uno de ellos como referencia (arriba, izquierda). En el programa que primero medimos la diferencia entre la parte superior izquierda y superior derecha, esto nos da el columpio "de izquierda a derecha". Luego utilizamos la diferencia entre la parte superior izquierda e inferior izquierda, dado nos la inclinación. (Aún me gustaría saber de por qué usé una 4 º...).
En el fondo, caliente-pegué uno de los brazos de los servos.













