Paso 1: Unir las placas
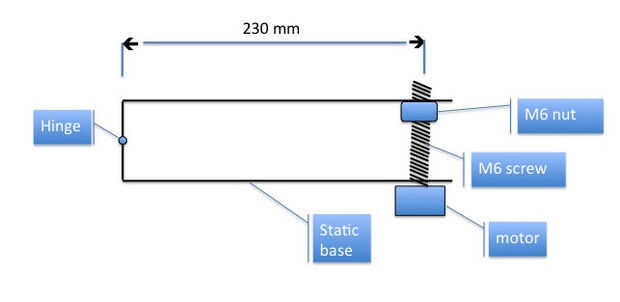




Ahora es el momento de montar las placas con tornillos y tuercas y motor. Todos los agujeros de tornillo son 20 mm distanciado. La tuerca es mantener dentro de la pequeña "jaula" de barra de aluminio de U. De esta manera la placa superior puede moverse hacia arriba y hacia abajo.
El agujero para el tornillo de motor es 10-12 mm oval forma.
Realiza la conexión del trípode 1/4 rosca WHITWORTH.
Primer modelo que he utilizado un motor del engranaje de 2 rpm en 12VDC gestionado por modelo RC ESC y servo tester. (si está interesado me pregunta).
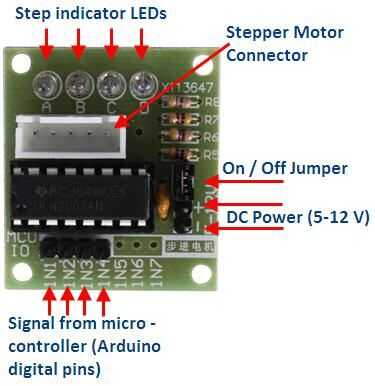
Después he usado Arduino y motor de pasos de cables 5 de acondicionador de aire. Supongo que el motor utilizado en el kit es útil para esto. Las cosas importantes es que el motor tiene que funcionar 1 rotación cada 60 segundos.
He instalado la placa Arduino y el controlador paso a paso dentro de la caja de plástico.
Sketch de Arduino utilizado:
______________________________________________________________________________________
Este ejemplo de Arduino demuestra funcionamiento bidireccional de una
28BYJ-48, que está disponible en eBay, con un ULN2003
placa de interfaz para el paso a paso. El motor de 28BYJ-48 es un 4-
fase, motor de 8 beats, dirigida hacia abajo por un factor de 68. Una bipolar
la bobina está en motor pins 1 y 3 y el otro en pernos motor 2 y 4.
Consulte la documentación del fabricante de Changzhou Batán
Motor Co., Ltd., entre otros. El ángulo de paso es 5.625/64 y la
Frecuencia de funcionamiento es 100pps. Consumo de corriente es 92mA. En este
ejemplo, la velocidad y dirección del motor paso a paso se determina
ajustando un potenciómetro de 1k ohm conectado al pin de Arduino A2.
Cuando el potenciómetro se gira completamente hacia la izquierda, el motor
gira a la velocidad completa en sentido antihorario. Como es el potenciómetro
girar hacia la derecha, que el motor seguirá lento hacia abajo hasta que es
alcanza su velocidad mínima en el valor de punto medio del potenciómetro.
Una vez que el potenciómetro cruza su punto medio, el motor de la inversión
Dirección. Como se gira el potenciómetro en sentido horario, más la velocidad
del motor aumentará hasta que alcance su rotación completa hacia la derecha
velocidad cuando el potenciómetro ha sido girado completamente en sentido horario.
///////////////////////////////////////////////
/ declarar variables para los pernos motor
motorPin1 int = 8; Azul - 28BYJ48 pin 1
motorPin2 int = 9; Rosa - 28BYJ48 pin 2
int motorPin3 = 10; Amarillo - 28BYJ48 pin 3
int motorPin4 = 11; Naranja - pin 28BYJ48 4
Rojo - 28BYJ48 pin 5 (VCC)
motorSpeed int = 0; variable para ajustar la velocidad del paso a paso
int potPin = 2; potenciómetro conectado al A2
int potValue = 0; variable para leer la entrada A0
//////////////////////////////////////////////////////////////////////////////
void setup() {}
declarar los pernos motor como salidas
pinMode (motorPin1, salida);
pinMode (motorPin2, salida);
pinMode (motorPin3, salida);
pinMode (motorPin4, salida);
Serial.Begin(9600);
}
//////////////////////////////////////////////////////////////////////////////
void loop() {}
potValue = analogRead(potPin); leer el valor del potenciómetro
Serial.println(potValue); Ver gama completa de 0 - 1024 en el Monitor Serial
Si (potValue < 535) {/ / si el potenciómetro Lee 0 a 535 ello
motorSpeed = (potValue/15 + 5); escala potValue para ser útil para el motor
ClockWise(); ir a la función de rotación de cw
}
Else {//value del potenciómetro es 512-1024
motorSpeed = ((1024-potValue)/15 + 5); potValue escala de velocidad del motor
Counterclockwise(); ir la la función de rotación ccw
}
}
/////////////////////////////////////////////////////////////////////////////
ajustar pernos a ULN2003 alta en secuencia de 1 a 4
retrasar "motorSpeed" entre cada ajuste de perno (para determinar la velocidad)
anular hacia la izquierda () {}
1
digitalWrite (motorPin1, HIGH);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin4, bajo);
Delay(motorSpeed);
2
digitalWrite (motorPin1, HIGH);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin4, bajo);
retardo (motorSpeed);
3
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin4, bajo);
Delay(motorSpeed);
4
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin4, bajo);
Delay(motorSpeed);
5
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin4, bajo);
Delay(motorSpeed);
6
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin4, HIGH);
retardo (motorSpeed);
7
digitalWrite (motorPin1, LOW);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin4, HIGH);
Delay(motorSpeed);
8
digitalWrite (motorPin1, HIGH);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin4, HIGH);
Delay(motorSpeed);
}
/////////////////////////////////////////////////////////////////////////////
ajustar pernos a ULN2003 alta en secuencia de 4 a 1
retrasar "motorSpeed" entre cada ajuste de perno (para determinar la velocidad)
void clockwise() {}
1
digitalWrite (motorPin4, HIGH);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin1, LOW);
Delay(motorSpeed);
2
digitalWrite (motorPin4, HIGH);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin1, LOW);
retardo (motorSpeed);
3
digitalWrite (motorPin4, bajo);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin1, LOW);
Delay(motorSpeed);
4
digitalWrite (motorPin4, bajo);
digitalWrite (motorPin3, HIGH);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin1, LOW);
Delay(motorSpeed);
5
digitalWrite (motorPin4, bajo);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin1, LOW);
Delay(motorSpeed);
6
digitalWrite (motorPin4, bajo);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin2, HIGH);
digitalWrite (motorPin1, HIGH);
retardo (motorSpeed);
7
digitalWrite (motorPin4, bajo);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin1, HIGH);
Delay(motorSpeed);
8
digitalWrite (motorPin4, HIGH);
digitalWrite (motorPin3, bajo);
digitalWrite (motorPin2, LOW);
digitalWrite (motorPin1, HIGH);
Delay(motorSpeed);
}
____________________________________________________________________________________
el esquema es muy simple puede ejecutar el motor de pasos de ajuste de velocidad por potenciómetro.













